
Я их видел под микроскопом, в крови людей… Поэтому и обсудил с ИИ статью «Молекулярные роботы из липидных пузырьков» – Lipid vesicle-based molecular robots, вот PDF (англ.), а вот – русский перевод с ошибками, зато с картинками, а ниже – еще один перевод, более понятный!
Эта статья объяснила очень МНОГОЕ из моих загадочных микро-наблюдений, которых я раньше не понимал. Я этих жировые капли раньше называл “коацерватами”, но теперь шутливо называю «жировые нанороботы»😀, ибо я лично снял видео, как они двигаются в крови. Хотя они и похожи на капли растительного масла в воде – но они активные, подвижные, и с многоуровневой “начинкой”, как матрёшки… Затем ИИ объяснил мне понятным языков компоненты этой технологии, и перевёл статью полностью на русский, а потом мы поговорили о следствиях этой технологии – о будущем, о перспективах и различных временных линиях развития событий, о способах детокса этих нанороботов, помогает ли голодание, и т.д… Беседа велась с ИИ Google – Gemini 1.5 Pro.
КРАТКО:
Представьте себе крошечных роботов – их можно увидеть только под микроскопом. Ученые работают над созданием таких роботов из молекул – мельчайших строительных блоков всего живого. Этих роботов называют молекулярными. Представьте, что такие роботы плавают в вашем кровотоке…
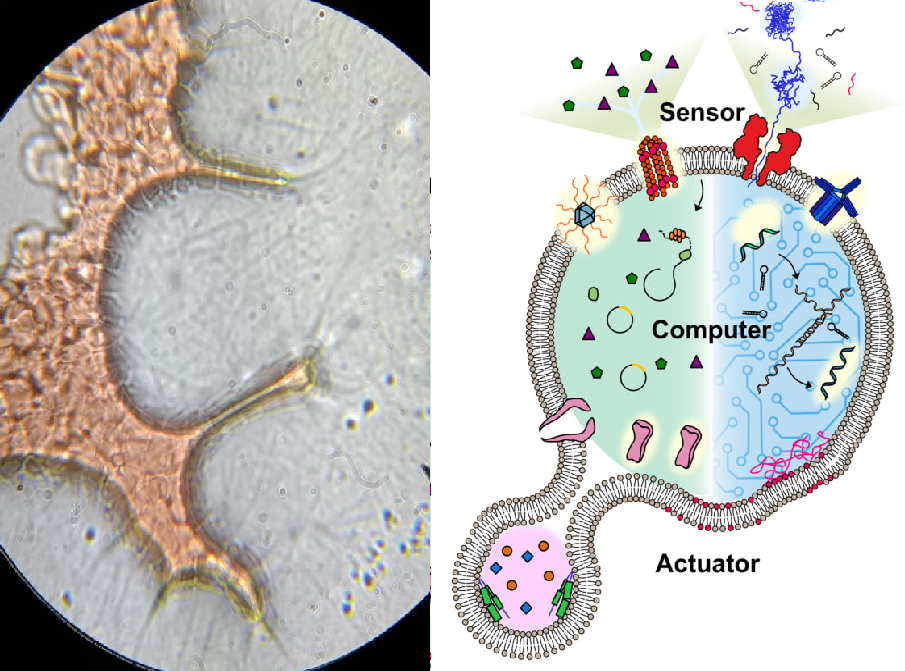
Чтобы создать таких роботов, ученые используют липидные [жировые] пузырьки – представьте себе крошечные мыльные пузыри – в качестве корпуса робота. Внутри пузырька находятся молекулярные машинки, которые выполняют разные функции.
- Сенсоры, как антенны, улавливают сигналы из окружающей среды – например, наличие определенного вируса или токсина.
- Компьютер, подобный крошечному процессору, анализирует эти сигналы и принимает решения – например, “обнаружен вирус, нужно выпустить лекарство”.
- Актуаторы – это “руки” и “ноги” робота. Они выполняют действия, например, перемещают робота к цели или высвобождают лекарство.
В качестве компьютеров ученые используют ДНК или специальные системы, которые синтезируют белки. Эти белки могут быть, например, лекарством или частью “двигателя” робота. Ученые постоянно совершенствуют их, делая их более функциональными, надежными и долговечными.
ПОЛНАЯ БЕСЕДА.
Я: Сейчас твоя задача – тщательно суммаризировать эту научную статью, дав маркированный перечень ключевых идей. Тщательно подбирай самые подходящие русские термины при переводе – как это делают реальные учёные переводчики с английского на русский, соблюдай все устоявшиеся традиции научного перевода. ВСЕГДА давай в скобках оригинальный английский термин.
Эта обзорная статья посвящена молекулярным роботам на основе липидных везикул. Авторы подробно описывают основные компоненты таких роботов, последние достижения в повышении их функциональности, а также текущие вызовы и перспективы. Особое внимание уделяется применению молекулярных роботов для определения биомаркеров, коммуникации с живыми клетками и преобразования энергии.
Ключевые идеи:
- Молекулярный робот (Molecular robot): Система, состоящая из одной или нескольких молекулярных машин и компьютеров, способная выполнять сложные задачи. В её состав входят:
- Корпус (Body): Обычно это липидная везикула (чаще всего гигантская униламеллярная везикула, GUV), которая инкапсулирует молекулярные машины.
- Сенсоры (Sensors): Ионные каналы, нанопоры, мембранные рецепторы, улавливающие сигналы из окружающей среды.
- Компьютеры (Computers): ДНК-компьютеры или системы бесклеточного синтеза белка (БСБ, CFPS), обрабатывающие сигналы и принимающие решения.
- Актуаторы (Actuators): ДНК-наноструктуры, пептиды, белки, преобразующие сигналы в физические действия (деформацию или движение).
- Липидные везикулы (Lipid vesicles): Предпочтительный корпус для молекулярных роботов благодаря биомиметичности, возможности инкапсуляции крупных молекул и настраиваемому размеру и составу. Существуют различные архитектуры везикул: униламеллярные, многослойные, вложенные, многокамерные, тканеподобные, биогибридные и гибридные. Микрофлюидные технологии позволяют создавать монодисперсные везикулы с высокой эффективностью инкапсуляции.
- Сенсоры: Белковые нанопоры (protein nanopores) являются наиболее распространенным типом сенсоров. Пептидные нанопоры (peptide nanopores) предлагают большую гибкость дизайна. ДНК-нанопоры (DNA nanopores) и рецепторы (receptors) позволяют достичь высокой программируемости. Синтетические каналы (synthetic channels) на основе макроциклических молекул, фолдамеров, CNT и MOP/MOC предлагают широкий спектр функций.
- Компьютеры: ДНК-компьютеры (DNA computing) используют программируемость ДНК для выполнения параллельных вычислений и создания логических схем. БСБ (CFPS) позволяет синтезировать белки в ответ на входные сигналы, обеспечивая более разнообразный выход по сравнению с ДНК-компьютерами.
- Актуаторы: ДНК-нанотехнологии (DNA nanotechnology) позволяют контролировать адгезию, слияние и деформацию мембран. Белки и пептиды (proteins and peptides) могут вызывать деформацию и движение везикул.
- Применение: Молекулярные роботы демонстрируют потенциал в области определения молекул (detection of molecules), коммуникации с живыми клетками (communication with living cells) и преобразования энергии (conversion of energy).
- Перспективы: Дальнейшие исследования направлены на повышение стабильности и срока службы GUV, улучшение гомогенности и селективности нанопор, развитие интеллектуальных ДНК- и БСБ-компьютеров, создание более управляемых актуаторов, улучшение взаимодействия между компонентами и разработку самоподдерживающихся систем.
Я: Ты использовал ряд аббревиатур и непонятных слов GUV, везикула, униламеллярная , БСБ (CFPS) и другие. Дай словарик использованных терминов и аббревиатур, в алфавитном порядке.
ИИ Gemini 1.5 Pro: Конечно, вот словарь терминов и аббревиатур, использованных в выжимке статьи, в алфавитном порядке:
- БСБ (CFPS – Cell-free protein synthesis): Бесклеточный синтез белка. Метод синтеза белка in vitro, без использования живых клеток.
- Везикула (Vesicle): Маленький замкнутый пузырёк, отделённый от окружающей среды липидной мембраной, содержащий внутри водную среду. Служит в качестве корпуса для молекулярных роботов, изолируя их внутреннее содержимое.
- Гигантская униламеллярная везикула (Giant unilamellar vesicle – GUV): Большая (диаметром более 2 мкм) везикула, окруженная одной липидной мембраной. Часто используется в качестве корпуса для молекулярных роботов из-за своего размера, достаточного для размещения сложной молекулярной машинерии.
- ДНК-компьютер (DNA computing): Вычислительная система, использующая молекулы ДНК для проведения операций. Преимущества включают параллелизм и низкое энергопотребление.
- Липидная мембрана (Lipid membrane): Мембрана, состоящая из двух слоёв липидных молекул. Основной компонент клеточных мембран и липидных везикул.
- Молекулярная машина (Molecular machine): Молекула или комплекс молекул, способный выполнять механические движения в ответ на специфические стимулы.
- Молекулярный робот (Molecular robot): Устройство наноразмерного масштаба, состоящее из компонентов, подобных тем, что встречаются в живых клетках, таких как сенсоры, компьютер и актуаторы. Предназначен для выполнения определенных задач на молекулярном уровне.
- Нанопора (Nanopore): Наноразмерное отверстие в мембране, которое может быть использовано для обнаружения и анализа отдельных молекул.
- Униламеллярная (Unilamellar): Описывает везикулу, имеющую одну липидную мембрану (в отличие от многослойных везикул).
Я: Теперь объясни всю суть этой статьи простыми словами – для обычного обывателя, не знакомого с научной терминологией.
ИИ Gemini 1.5 Pro: Представьте себе крошечных роботов, настолько маленьких, что их можно увидеть только под мощным микроскопом. Ученые работают над созданием таких роботов из молекул – мельчайших строительных блоков всего живого. Этих роботов называют молекулярными.
Для чего они нужны? Представьте, что такие роботы плавают в вашем кровотоке, обнаруживают больные клетки и доставляют лекарства прямо к ним. Или очищают загрязненную воду, поглощая вредные вещества. Или даже производят энергию из солнечного света прямо внутри крошечной “электростанции” внутри себя.
Чтобы создать таких роботов, ученые используют липидные пузырьки – представьте себе крошечные мыльные пузыри – в качестве корпуса робота. Внутри пузырька находятся молекулярные машинки, которые выполняют разные функции.
- Сенсоры, как антенны, улавливают сигналы из окружающей среды – например, наличие определенного вируса или токсина.
- Компьютер, подобный крошечному процессору, анализирует эти сигналы и принимает решения – например, “обнаружен вирус, нужно выпустить лекарство”.
- Актуаторы – это “руки” и “ноги” робота. Они выполняют действия, например, перемещают робота к цели или высвобождают лекарство.
В качестве компьютеров ученые используют ДНК или специальные системы, которые синтезируют белки. Эти белки могут быть, например, лекарством или частью “двигателя” робота.
Пока что молекулярные роботы находятся на ранней стадии разработки. Но ученые постоянно совершенствуют их, делая их более функциональными, надежными и долговечными. Возможно, в будущем эти крошечные роботы произведут революцию в медицине, экологии и энергетике.
Я:
А теперь посмотри на исходный текст статьи – и переведи её на русский ПОЛНОСТЬЮ, с начала и до конца. При этом следи, чтобы получился гладкий текст. Всевозможные технические сноски можно выкинуть. Задача – чтобы была гладкая готовая к публикации русскоязычная статья – перевод.
ИИ Gemini 1.5 Pro:
Молекулярные роботы на основе липидных везикул
Введение
Машины, созданные для выполнения специфических действий, освободили человечество от изнурительного труда, помогая нам справляться с задачами, невыполнимыми одними лишь человеческими руками. Революция в механизации началась во второй половине 18 века и привела к невообразимым ранее улучшениям качества жизни. За последние 40 лет эта революция породила новое поколение машин меньшего размера, расширяя границы их применения. В области органической химии в начале 1980-х годов Жан-Пьер Соваж сообщил о прорывном открытии молекулярного катенана с двумя сцепленными кольцами, что впоследствии вдохновило других ученых на разработку молекулярных машин со сложными функциями, таких как ротаксаны, моторы и наномашины. В 2016 году трем пионерам молекулярных машин была присуждена Нобелевская премия по химии, что отражает признание широкого влияния молекулярных машин.
Концепция молекулярных машин стимулировала исследования в новой области, называемой «молекулярные роботы». Согласно Кембриджскому словарю, робот — это «машина, управляемая компьютером, которая используется для автоматического выполнения работ». По этому определению, молекулярный робот — это система, состоящая из молекулярных машин и компьютеров, которые используются для автоматического выполнения задач. Живую клетку можно рассматривать как один из таких чудесных роботов, созданных природой. С ДНК, служащей компьютером для предоставления решений, и белками, работающими как машины для выполнения определенных функций, живая клетка выполняет сложные задачи независимо от человеческого контроля. Черпая вдохновение из живых клеток, конечная цель области молекулярных роботов — искусственно создать автоматизированную систему, способную решать задачи на молекулярном уровне с помощью молекулярных машин и компьютеров.
Молекулярный робот всегда включает в себя некоторые или все из следующих компонентов: корпус, сенсоры, компьютеры и актуаторы (Рис. 1). Пионеры в этой области применяли гидрогели в качестве корпуса молекулярных роботов, однако отсутствие барьера между внутренним содержимым и окружающей средой может привести к нежелательной утечке. Липидные везикулы, состоящие из липидных мембран, отделяющих внутренний просвет от внешнего раствора, представляют собой альтернативу, которая может полностью решить эту проблему. Размер липидных везикул может варьироваться от нано- до микрометров в диаметре. Для молекулярных роботов желательны везикулы микронного размера, так называемые гигантские униламеллярные везикулы (GUV), из-за потребности в достаточном внутреннем объеме для размещения сенсоров, компьютеров и актуаторов. Молекулярным роботам требуются сенсоры для обнаружения сигналов в окружающей среде. Это может быть достигнуто с помощью ионных каналов или нанопор, которые создают отверстия в липидных мембранах. Нанопоры могут действовать как фильтр сигналов, избирательно транспортируя молекулярные сигналы в зависимости от их размера или заряда. После транспортировки сигналы могут обрабатываться и транслироваться молекулярными вычислительными машинами. ДНК-вычисления, впервые предложенные Л. Адлеманом в 1994 году, за последние десятилетия превратились в компьютеры, применимые в молекулярных роботах, благодаря их способности выполнять несколько параллельных вычислений. Альтернативным вариантом для вычислительной машины является бесклеточный синтез белка (CFPS), позволяющий получать белки in vitro в ответ на ввод ДНК. Актуаторы для молекулярных роботов, которые включают ДНК-наноструктуры, пептиды и белки, преобразуют сигналы для достижения физических движений, таких как деформация или движение.
Хотя в разработке базовых технологий постоянно достигается прогресс, исследования по прототипированию молекулярных роботов имеют недолгую историю. В 2014 году Нишимура и др. включили CFPS в GUV, а затем, в присутствии аминокислот, был осуществлен синтез GFP в качестве выходного сигнала. В 2017 году Сато и др. разработали GUV, оснащенные актуаторами, содержащими ДНК-муфты и микротрубочные моторы. После светового облучения муфта зацеплялась, и форма GUV претерпевала последовательные изменения. Эти новаторские исследования прокладывают четкий путь к созданию молекулярных роботов с все более сложными функциями.
Следует отметить, что молекулярные роботы иногда используют технологии, связанные с областью искусственных клеток. Цель создания искусственных клеток — имитировать функцию живых клеток, в то время как молекулярные роботы делают упор на разработке инженерных приложений, которые могут помочь людям выполнять задачи в микро- или наноразмерах. Поэтому существует стремление создавать молекулярные роботы с функциями, превосходящими функции живых клеток (подробности об искусственных клетках см. в предыдущих обзорах). Этот обзор посвящен последним достижениям и проблемам в основных технологиях молекулярных роботов и исследует новые направления. Мы также выделяем некоторые применения молекулярных роботов, такие как молекулярное зондирование, коммуникация с живыми клетками и преобразование энергии. Наконец, мы завершаем обсуждением потенциальных направлений исследований в этой области в течение следующего десятилетия.
Корпус молекулярных роботов
Молекулярные роботы обычно требуют инкапсуляции внутри компартмента, который действует как граница, отделяющая внутреннюю среду от внешней. На сегодняшний день использовались различные типы компартментов, включая липидные мембраны, гидрогели, блок-сополимеры, ДНК-капли и коацерваты, каждый из которых предлагает свои преимущества и ограничения. Некоторые исследователи изучили формирование гибридных шасси путем объединения различных типов компартментов, используя преимущества, связанные с каждой составной частью. Например, коацерватные или ДНК/гидрогелевые системы, сопряженные с липидными мембранами, могут быть объединены для повышения функциональности.
Среди этих типов компартментов липидные везикулы являются наиболее часто используемыми по нескольким причинам. Во-первых, они биомиметичны, очень похожи на биологические мембраны с химической и морфологической точки зрения. Эта характеристика позволяет легко включать мембраносвязанные молекулярные машины, включая мембранные белки, нанопоры и рецепторы, тем самым придавая мембранам специфические функции. Например, контролируемый поток молекул груза в ответ на стимулы, который может быть использован для опосредования реакций в живых клетках.
Кроме того, липидные везикулы химически инертны и высокоэффективны в компартментализации крупных заряженных молекул от окружающей среды, создавая химически отличную внутреннюю среду. Эта особенность позволяет исследователям использовать разнообразие липидных строительных блоков, как синтетических, так и биологических, для создания функциональных мембран с различными свойствами. Примеры включают мембраны, способные к самосборке в тканеподобные структуры, мембраны, которые могут разбираться и собираться в ответ на физико-химические сигналы для перераспределения материала между ними, и мембраны, которые высвобождают груз, запускаемый светом, колебаниями температуры, магнитными полями или биомаркерами. Такая универсальность открывает захватывающие возможности для молекулярной робототехники и систем адресной доставки лекарств, среди прочих применений.
Везикулы можно классифицировать в первую очередь на основе их размера и слоистости. GUV имеют диаметр приблизительно 2 мкм и более (что делает их везикулами размером с клетку), состоящими из одной липидной мембраны (в отличие от многослойных луковичных структур, известных как многоламеллярные везикулы). Другие типы везикул включают малые и большие униламеллярные везикулы, которые попадают в субмикронный диапазон размеров, а также многовезикулярные везикулы (мультисомы). Кроме того, были представлены интригующие примеры гибридных структур, где везикулы разных типов собираются в более сложные архитектурные композиции, такие как вложенные или слоистые геометрии. На рис. 2 показана схема различных архитектур, которые теперь можно создавать с помощью микрофлюидных методов и принципов биомембранной инженерии.
В молекулярной робототехнике GUV часто являются предпочтительной архитектурой из-за их разрешающей способности с помощью оптической микроскопии. Более того, они обеспечивают эффективную инкапсуляцию крупных и сильно заряженных строительных блоков (ДНК, белков, наночастиц и даже целых органелл/клеток), что становится более проблематичным при использовании везикул в субмикронном режиме. Например, для инкапсуляции биомолекулярных компонентов, необходимых для транскрипции и трансляции, необходимо ко-инкапсулировать точные стехиометрии плазмид, рибосом, полимераз и около 40 других молекулярных компонентов. Достижение такой точности становится статистически невероятным в режимах меньшего размера. Таким образом, GUV обеспечивают более подходящую среду для размещения этих сложных биомолекулярных систем.
Стратегии создания везикул
Для создания GUV доступны различные методы, причем в этой области опубликовано несколько исчерпывающих обзоров. При оценке различных методов важно учитывать соответствующие ключевые показатели эффективности (KPI), которые включают:
(i) Эффективность инкапсуляции. Эффективность метода инкапсуляции молекул может варьироваться в зависимости от типа участвующей молекулы. В приложениях молекулярной робототехники достижение высокой эффективности инкапсуляции для крупных заряженных частиц (таких как ДНК, белки, наночастицы и т. д.) имеет решающее значение, поскольку они способствуют функциональности системы.
(ii) Монодисперсность и контроль размера. Способность производить везикулы с четко определенными размерами имеет первостепенное значение, поскольку размер напрямую влияет на последующие применения, а постоянные размеры обеспечивают стабильную производительность.
(iii) Контроль архитектуры и липидного состава. В идеале метод должен обеспечивать точный контроль над липидным составом мембраны везикулы, обеспечивая однородность и получение униламеллярных мембран (или мембран с определенной многослойностью).
(iv) Пропускная способность производства. Для практического применения выгодно производить значительное количество везикул в разумные сроки для эффективного удовлетворения производственных потребностей.
(v) Наличие примесей. Некоторым применениям, особенно тем, которые связаны с фундаментальными биологическими исследованиями, полезны мембраны везикул, свободные от каких-либо примесей и масла.
Учет этих KPI при оценке различных методов создания GUV поможет исследователям выбрать наиболее подходящий метод для своих конкретных применений, обеспечивая оптимальную производительность и надежные результаты.
Классические методы создания GUV включают мягкую гидратацию, набухание с помощью геля и электроформирование. Эти методы сыграли ключевую роль в революционном изменении нашего понимания явлений биофизики мембран. Они предоставили важные сведения о механических свойствах мембран, влиянии липидного состава, связи между механикой и активностью мембранных белков, а также о принципах, регулирующих фазовое поведение и сосуществование доменов (липидных рафтов) в клеточных мембранах. Однако для приложений молекулярной робототехники эти методы оказались в основном непригодными из-за их ограничений. Они страдают от низкой эффективности инкапсуляции, неконтролируемого производства и дают полидисперсные популяции по размеру, архитектуре, грузу и липидному составу.
За последние два десятилетия инновации привели к появлению нового класса стратегий изготовления везикул, основанных на технологии вода/масло эмульсии (рис. 3(a)). Эти методы основаны на формировании капель вода/масло, стабилизированных липидными монослоями. Когда на эти капли наносится второй липидно-стабилизированный водно-масляный интерфейс (т. е. когда они переносятся из объемной масляной фазы в водную фазу), это формирует второй монослой, что приводит к образованию липидной мембраны. Эти методы иногда называют методами переноса эмульсии или фазового переноса.
Простейший вариант этого метода включает ручное формирование эмульсии вода/масло путем пипетирования и/или перемешивания с последующим фазовым переносом под действием силы тяжести, часто с помощью центрифуги. Этот процесс можно повторять несколько раз для получения многослойных структур. Этот метод легко адаптируется для переноса в микрофлюидный формат, где устройства могут быть созданы с использованием мягкой литографии, стеклянных капилляров или 3D-печати. Производство капель на чипе и перенос через границу раздела вода/масло может быть достигнуто с помощью микрофабрикованных столбов или подходов, основанных на потоке. Другой подход включает использование специализированного оборудования для обеспечения прохождения монодисперсных капель через непрерывно вращающуюся горизонтальную колонку на границе раздела вода/масло, метод, известный как cDICE (непрерывная инкапсуляция с пересечением границы раздела капель), показанный на рис. 3(b).
Альтернативный метод использует микрофлюидику для формирования двойной эмульсии вода/масло/вода, стабилизированной липидами. После испарения или десмачивания промежуточной масляной фазы этот процесс приводит к образованию GUV. Наиболее часто используемый вариант этого метода использует октанол для ускорения десмачивания и поэтому называется октанол-опосредованной сборкой липосом (OLA) (рис. 3(c)).
Преимущества микрофлюидики
Использование микрофлюидики позволяет осуществлять высокопроизводительное производство монодисперсных (<5% C.V.) GUV с определенными размерами (диаметр около 5–200 мкм) и удивительно высокой эффективностью инкапсуляции (приближающейся к 100%). В контексте создания, манипулирования и анализа систем молекулярных роботов на основе везикулярных структур в игру вступают другие микрофлюидные модули «лаборатория на чипе». Например, ловушки для микроструктур использовались для захвата массивов сотен везикул, облегчая высокопроизводительные эксперименты и расширенный анализ. Эти ловушки были соединены с клапанами для управления перфузией материалов для исследований проницаемости. Модули очистки также были включены для удаления неинкапсулированного материала и мусора из окружающей среды.
Различные геометрии чипов могут быть использованы для создания многокамерных архитектур, таких как везикулы в везикулах и структуры с компартментами бок о бок. Путем функционализации компартментов ферментами, ДНК-программами, наночастицами и CFPS были достигнуты различные характеристики, такие как сигнальные каскады, межкомпартментная связь, деление и пространственное разделение реакций внутри этих микророботов. Более того, соединение тысяч везикул через адгезивные мембранные патчи привело к созданию тканеподобных структур с самовосстанавливающимися свойствами. Связанные технологии включают оптофлюидные методы, которые используют оптическую ловушку и лазерные технологии для слияния компартментов по требованию. Эти методы запускают биохимические реакции в реакционных сосудах фемтолитрового (пл/фл) объема, изучают архитектурные преобразования, вызванные смешиванием липидов, и манипулируют рафтоподобными доменами на поверхности везикул.
Сенсоры молекулярных роботов
В живых клетках мембранные рецепторы, транспортеры и ионные каналы работают как сенсоры, помогая клеткам реагировать на химические и физические стимулы. Такие функции также были использованы для реализации сенсорных возможностей в молекулярных роботах. В частности, нанопоры, образующие стабильные наноразмерные отверстия в липидных мембранах, как было показано, опосредуют транспорт крупных молекул, позволяя обнаруживать их молекулярными роботами. Открытие и закрытие нанопор (гейтирование) может регулироваться стимулами окружающей среды (например, pH, светом, температурой, осмотическим давлением), что еще больше расширяет сенсорные возможности молекулярных роботов. Для создания нанопор использовались различные материалы, включая белки, пептиды, ДНК и синтетические материалы. В данном разделе мы в основном сосредоточимся на характеристиках, различиях и последних достижениях в сборке нанопор с использованием различных строительных материалов, а также опишем некоторые уникальные подходы, которые вводят мембранные рецепторы в GUV. (Для получения более подробной информации о введении мембранных рецепторов в GUV мы отсылаем читателей к обзору Тосака и др.).
Белковые нанопоры
Белковые нанопоры – наиболее широко используемый тип нанопор как в системах планарных липидных мембран, так и в системах липидных везикул. При реконструкции в системах планарных мембран нанопоры являются мощными инструментами для обнаружения отдельных молекул. Целевые молекулы обнаруживаются путем регистрации изменения выходного ионного тока при прохождении молекул через нанопоры при постоянном входном напряжении. Поскольку чувствительность обнаружения с помощью нанопор в значительной степени зависит от размера и структуры пор, для обнаружения конкретных мишеней был исследован широкий спектр белков. В 1996 году α-гемолизин (aHL) с размером пор 1,4 нм в месте сужения, который совместим с транслокацией одноцепочечной ДНК (оцДНК), был первоначально использован Казиановичем и др. для обнаружения полинуклеотидов. В 2010 году было обнаружено, что порин A Mycobacterium smegmatis (MspA) подходит для различения отдельных нуклеотидных оснований. Вышеупомянутые новаторские работы в конечном итоге привели к выпуску первого коммерческого секвенатора ДНК на основе нанопор для общего использования в 2015 году компанией Oxford Nanopore Technologies с использованием канала транспорта курли E. coli, CsgG. После достижения секвенирования ДНК на основе нанопор (рис. 4(a)) в настоящее время ведутся работы по анализу отдельных молекул свернутых белков и аминокислотных последовательностей в белках. Достижения, такие как обнаружение единичных аминокислотных мутаций в пептидах с использованием аэролизина из Aeromonas hydrophila, последовательное считывание пептидов с использованием MspA и идентификация фрагментов переваренного белка с использованием фрагацеатоксина C из Actinia fragacea (FraC), были опубликованы в последние годы.
Для реализации молекулярных роботов были предприняты огромные усилия по созданию системы белковых нанопор-липидных везикул. Подобно системам планарных липидных мембран, транспорт молекул в системе липидных везикул сильно зависит от размера белковых нанопор. В дополнение к традиционным исследованиям с использованием белковых нанопор различного размера для транспорта флуорофоров, есть сообщения об использовании белковых нанопор для транспорта молекул в липидные везикулы, включая: передачу информации о pH через потенциал-зависимый анионный канал (VDAC, 2,5-3 нм) из митохондрий дрожжей, свето-/pH-зависимое высвобождение флуоресцентных молекул через механочувствительный канал большой проводимости (MscL, 3 нм) из E. coli, транспорт АТФ и UTP через aHL (1,4 нм) из Staphylococcus aureus, и транслокация РНК-полимеразы T7 (98 кДа) через стрептолизин O (SLO, 25-30 нм) из стрептококков группы A, C и G (рис. 4(b)).
Хотя были зарегистрированы многочисленные белковые нанопоры с диаметром пор от 1,2 до 42 нм, исследование новых белковых нанопор остается интригующим из-за необходимости расширения набора инструментов для новых целевых молекул. В 2023 году группа Маглиа сообщила об обнаружении белков различного размера с использованием α-спирального порообразующего токсина, полученного из Yersinia enterocolitica, YaxAB. Он состоит из димера YaxA и YaxB, образуя сборки различного размера, варьирующиеся от 8 до 12 димерных субъединиц. Характерной особенностью этой поры является ее огромная коническая форма с цис-/транс-отверстиями 15/3,5 нм (рис. 4(c)). Примечательно, что это самая большая белковая нанопора, когда-либо использованная для анализа свернутых белков в планарных мембранных системах, способная захватывать широкий спектр белков (от 35 до 125 кДа). YaxAB демонстрирует больший электроосмотический поток в условиях приложенного напряжения по сравнению с существующими нанопорами, что способствует захвату белков внутри нанопоры. Используя YaxAB, группа успешно отличила C-реактивный белок (CRP, 125 кДа), гемоглобин (HG, 64 кДа), стрептавидин (SA, 53 кДа) и бычий тромбин (BT, 35 кДа) из их смеси. Более того, CRP был обнаружен в клинически значимых концентрациях (>2,5 мг л⁻¹) в 160-кратном разведении обедненной сыворотки человека.
Также сложно обнаруживать молекулы, которые больше поры, или избирательно различать молекулы аналогичного размера и гидродинамического радиуса. Связывание специфичных для мишени фрагментов, таких как домены частичных антител, аптамеры (одноцепочечные нуклеиновые кислоты со способностью связываться с определенными молекулами), биотин (для авидин-биотинового комплекса), ингибирующие пептиды, белковые рецепторы и золотые нанокластеры, были использованы для достижения обнаружения крупных молекул или избирательной дискриминации. Поскольку конфигурация системы обнаружения изменяется в зависимости от используемого элемента распознавания, необходимо было разработать отдельную систему для каждого целевого белка. Недавно Мовиляну и его коллеги сообщили об общей системе для чувствительного обнаружения целевых белков. В их исследовании нанопора tFhuA, β-бочковидный каркас компонента A поглощения гидроксамата железа (FhuA) из E. coli, ковалентно присоединяется к монободи, рекомбинантному белку на основе домена фибронектина типа III (FN3) (рис. 4(d)). Преимущества монободи заключаются в том, что их можно выбрать из широкого спектра вариантов против многочисленных целевых белков, и их относительно небольшой гидродинамический радиус не мешает открытию пор, в отличие от более крупных белков, полученных из антител. Используя конъюгированную с монободи tFhuA, авторы обнаружили человеческий малый убиквитин-подобный модификатор 1 (hSUMO1), белок WD40 repeat 5 (WDR5). Более того, группа достигла идентификации 20 нМ рецептора эпидермального фактора роста (EGFR), который является прогностическим белковым биомаркером 180 кДа, связанным с раком легких, толстой кишки и молочной железы, в 5% (об./об.) фетальной бычьей сыворотке (FBS), что свидетельствует о потенциальном применении молекулярных роботов в наномедицине.
Пептидные нанопоры
Как и в случае с белковыми нанопорами, пептиды, которые собираются в поры в мембране, также привлекательны в качестве сенсоров в молекулярных роботах. По сравнению с белковыми нанопорами, пептидные нанопоры более управляемы, поскольку стабильные пептидные нанопоры могут быть разработаны на основе встречающихся в природе последовательностей или путем de novo дизайна, а пептиды с 30-40 остатками, необходимыми для прохождения через мембрану, могут быть синтезированы в больших количествах путем химического синтеза. Первоначально было известно, что антибактериальные пептиды (АМП), такие как грамицидин и аламетицин, собираются с образованием пор в бактериальных мембранах, проявляя антибактериальную активность (рис. 5(a)). Сообщалось, что АМП-нанопоры обеспечивают проникновение малых молекул, таких как флуорофоры, но оказалось трудно транспортировать молекулы с большей молекулярной массой. В последние годы были предприняты попытки разработать более стабильные и монодисперсные по размеру пептидные нанопоры по сравнению с АМП-нанопорами.
Один из подходов к получению стабильных пептидных нанопор – редизайн трансмембранных участков природных мембранных белков. Преимущество этого подхода заключается в том, что не требуются явные сложные принципы дизайна, и ожидается определенная степень стабильности. Переработанные пептидные нанопоры показали, что такие трансмембранные пептиды стабильно образуют поры с определенным числом мономеров, открывая область пептидных нанопор и предоставляя многообещающие порообразующие пептиды на сегодняшний день. Недавно группа Махендрана сообщила, что DpPorA, представляющий собой замещенный D-аминокислотой пептид pPorA, полученный из порина PorACj Corynebacterium jeikeium, может образовывать стабильную монодисперсную октамерную пору (рис. 5(b)). По сравнению с обычными спиральными цилиндрами, DpPorA характеризуется очень большой проводимостью и высокой селективностью по отношению к катионам, так что циклодекстрины и нонааргинин (R9) могут перемещаться под действием приложенного напряжения в планарной мембранной системе, в то время как взаимодействие с анионными циклодекстринами и олигопептидами незначительно. Примечательно, что в то время как их L-аналоги легко разрушаются протеиназой K, DpPorA обладает высокой устойчивостью к обработке протеиназой K, что указывает на многообещающий потенциал для использования в качестве стабильного сенсора в молекулярных роботах в биологической среде.
Подобно белковым нанопорам, другой подход к получению пептидных нанопор – это de novo дизайн пептидов. В последние годы было описано несколько de novo разработанных α-спиральных пептидов, поскольку α-спирали позволяют оценить межспиральную стабильность и точно контролировать поверхности упаковки. В 2021 году Вулфсон и его коллеги сообщили о de novo дизайне α-спирального пептида, который образует стабильные монодисперсные по размеру поры. Они начали с разработки водорастворимого α-спирального цилиндра путем введения полярных остатков в просвет α-спиральных пучков пентамерного или более высокого порядка (рис. 5(c)) для поддержки спирального интерфейса и прохождения молекул воды, что привело к параллельной гексамерной водорастворимой поре. Включая гидрофобный лейцин и предпочитающий мембранный интерфейс триптофан в наружную поверхность водорастворимой поры, были получены пептиды, которые образуют монодисперсные поры в мембране. Для дальнейшего улучшения межспиральной упаковки вычислительное моделирование было использовано для создания потенциально гексамерных нанопор с более длительным временем жизни и меньшим количеством состояний открытия-закрытия (гейтирование). Хотя обнаружение отдельных молекул не проводилось, вероятно, из-за малого размера пор, группа продемонстрировала создание водорастворимых спиральных цилиндров от 5 до 9-меров путем изменения размера остатков в определенных положениях на спиральном колесе, что позволяет увеличить размер пор и повысить способность к молекулярному транспорту.
В 2022 году Симидзу и др. сообщили о de novo дизайне β-шпилечных пептидов SV28 и SVG28, которые образуют трансмембранные β-бочковидные нанопоры, следуя четырем простым принципам дизайна: (i) чередующиеся гидрофильные и гидрофобные трансмембранные остатки, (ii) введение мембранных якорных остатков, (iii) введение заряженных остатков для встраивания в мембрану путем электрофореза и (iv) введение глицинового изгиба для уменьшения напряжения β-бочковидной структуры (только для SVG28) (рис. 5(d)). SV28 образует почти монодисперсные гептамерные поры в оптимизированных условиях и может различать L-PLL (молекулярная масса 30000-70000) и S-PLL (молекулярная масса 10000). Кроме того, SV28 обнаруживает катионные пептиды более эффективно, чем обычно используемая нанопора aHL, из-за ее концевого заряда. Более того, Фуджита и др. обнаружили, что гидрофильный вариант SV28 может быть синтезирован с помощью CFPS, который сохранил способность к образованию пор (рис. 5(e)), что обещает легкий доступ к пептидным нанопорам для молекулярной робототехники. Кроме того, мы показали, что SV28, предок SV28, может образовывать широкий диапазон размеров пор от 1,7 до 6,3 нм и может перемещать G4-структуру ДНК, когда размер пор достаточно велик. Поэтому мы считаем, что можно найти варианты последовательностей SV28, которые образуют нанопоры подходящего размера для молекулярного транспорта. В будущем необходимо не только разработать структуры пор в сборе, но и добавить вестибюльные области и выстилающие структуры, которые стабилизируют структуру пор.
ДНК-нанопоры и рецепторы
ДНК-нанотехнология представляет собой уникальный инструмент для имитации функции биологических нанопор в качестве сенсоров для молекулярных роботов благодаря своим преимуществам в гибкости дизайна и программируемости. Нанопоры, образованные ДНК-нанотехнологией, так называемые ДНК-нанопоры, могут быть реализованы с помощью стратегий ДНК-оригами, которые используют длинную одноцепочечную каркасную ДНК и сотни коротких ДНК-скрепок, а также стратегий ДНК-наноструктур, которые используют несколько коротких ДНК-цепей. Чтобы встроить ДНК-нанопоры в липидные мембраны, ДНК-нанопоры несут гидрофобные молекулы, такие как холестерин и токоферол, чтобы они могли взаимодействовать с гидрофобным ядром мембраны. Из первых двух новаторских ДНК-нанопор, которые транспортировали ионы через планарные липидные мембраны, в 2016 году Кришнан и др. сообщили об успешной транспортировке небольших молекул красителя через липидные мембраны GUV с использованием квадратных ДНК-нанопор с шириной канала просвета 4,2 нм (рис. 6(a)). С тех пор было сообщено о нескольких ДНК-нанопорах, которые функционируют на мембранах GUV.
Современные стратегии улучшения ДНК-нанопор, построенных с помощью ДНК-оригами, в основном сосредоточены на двух областях: расширение диаметра пор и добавление уникальных функций для селективного транспорта. Большая пора не только позволяет транспортировать более крупные молекулы, но также повышает эффективность транспорта. В 2021 году сообщалось о ДНК-нанопоре шириной 35 нм, способной транспортировать декстран с молекулярной массой до 250 кДа (рис. 6(b)). Кроме того, в 2022 году Син и др. разработали ДНК-нанопоры с различными полигональными формами и размерами, которые позволяют транспортировать антитела. Между тем, добавление таких функций, как контроль гейтирования, может обеспечить возможность селективного транспорта молекул. На сегодняшний день были продемонстрированы различные методы контроля гейтирования, включая: модификацию просвета пор молекулами PEG, изменение количества ДНК-цепей, подобных крышке, на вершине поры (рис. 6(c)) и обратимое открытие и закрытие с помощью ключевых ДНК-цепей (рис. 6(d)).
Хотя ДНК-оригами выгодно для построения пор с большими диаметрами, их универсальность и стабильность ограничены сложной процедурой проектирования. Напротив, ДНК-нанопоры на основе ДНК-наноструктур вызвали большой интерес благодаря своей более простой стратегии проектирования. На сегодняшний день сообщалось, что ДНК-нанопоры на основе ДНК-наноструктур с шестиспиральными (рис. 6(e)) или восьмиспиральными пучковыми структурами и каркасами треугольной и квадратной формы функционируют на мембранах GUV. Относительно небольшой размер просвета обеспечивает преимущество зарядово-селективного молекулярного транспорта, поскольку отрицательно заряженные молекулы ДНК имеют сильное электростатическое взаимодействие с заряженными молекулами груза (рис. 6(f)). Более того, были описаны аналогичные подходы для контроля гейтирования ДНК-нанопор с помощью входных сигналов, включая определенные молекулы, температуру, свет и механические стимулы.
Рецептор-имитирующие ДНК-наноструктуры, которые не прокалывают пору, а просто охватывают липидную мембрану, также являются потенциальными сенсорами для молекулярных роботов. В отличие от ДНК-нанопор, рецептор-имитирующие ДНК-наноструктуры не страдают от проблем утечки и, следовательно, могут обеспечивать передачу сигнала с высокой точностью. Типичные рецептор-имитирующие ДНК-наноструктуры включают две трансмембранные ДНК с доменом распознавания, якорным доменом и доменом амплификации. Когда входные сигналы достигают внешней мембраны GUV, две трансмембранные ДНК гибридизуются друг с другом и, следовательно, сближаются в пространстве. Домен амплификации, следовательно, образует G-квадруплексную структуру или комплементарные цепи, что приводит к возникновению дальнейших химических реакций внутри GUV. На сегодняшний день сообщалось о рецептор-имитирующих ДНК-наноструктурах, способных обнаруживать АТФ, лизоцим (рис. 6(g)) и ДНК-мессенджеры (рис. 6(h)).
Все вышеупомянутые отчеты были получены за последнее десятилетие. Таким образом, ожидается, что в следующем десятилетии ускорится создание ДНК-нанопор и рецептор-имитирующих ДНК-наноструктур с более сложными функциями. Что касается ДНК-нанопор, то в текущих исследованиях молекулярный транспорт осуществляется с помощью простой диффузии, тогда как активный транспорт молекул очень желателен. Что касается рецептор-имитирующих ДНК-наноструктур, то еще предстоит реализовать системы, которые могут обнаруживать несколько молекул и генерировать несколько реакций одновременно.
Синтетические каналы
Синтетические супрамолекулярные комплексы появились как тип пор, способных функционировать в липидных мембранах. Эти поры всегда имеют диаметр менее 1 нм и, таким образом, транспортируют только ионы, подобно ионным каналам в живых клетках. В предыдущих исследованиях эти поры назывались «нанопорами» или «наноканалами», но без четких критериев. В отличие от нанопор, которые могут транспортировать как ионы, так и более крупные молекулы, в данном обзоре мы определяем поры на основе синтетических супрамолекулярных комплексов как «синтетические каналы». Благодаря широкому химическому репертуару на сегодняшний день были созданы синтетические каналы с различными функциями. Полное введение в эту область выходит за рамки данного обзора, поэтому мы сосредоточимся на последних достижениях в этой области и обсудим, как они могут повлиять на область молекулярных роботов (для полного обзора синтетических каналов мы отсылаем читателей к предыдущим обзорам).
Селективный транспорт ионов – наиболее устоявшаяся функция для синтетических каналов и очень желательна для молекулярных роботов, поскольку она обеспечивает возможность строгого регулирования входной информации. Подобно природным ионным каналам, селективность синтетических каналов сильно зависит как от размера просвета пор, так и от типа функциональных групп в просвете пор. Начиная с нескольких новаторских работ в 1990-х годах, сообщалось о синтетических каналах, которые могут селективно транспортировать K+, Cl-, I- и H2O. В настоящее время усилия сосредоточены на создании каналов, которые могут селективно транспортировать более мелкие катионы. В 2023 году Чжан и др. сообщили о Li+-селективном синтетическом канале с использованием самособирающихся ароматических молекул (рис. 7(a)). Группа обнаружила, что канал с просветом диаметром 1,8 Å и четырьмя сайтами координации ионов внутри полости демонстрирует более высокую селективность транспорта Li+ по сравнению с Na+, достигая соотношений селективности Li+/Na+ от 15,1 до 23,0. Между тем, продолжается деятельность по разработке новых типов анион-селективных каналов. В 2020 году Рой и др. сообщили о полностью водородно-связанном спирально свернутом ароматическом фолдамере на основе синтетического канала с центральным просветом, образованным множеством метильных групп (рис. 7(b)). Метильные группы обеспечивают положительный электростатический потенциал, что приводит к селективности по отношению к анионам по сравнению с катионами. Более того, наблюдалось, что I- транспортируется более благоприятно, чем Cl-, из-за меньшего количества водородных связей у I- по сравнению с Cl- (соотношение селективности I-/Cl- составляло около 11).
Чувствительность к внешним стимулам – еще одна важная функция синтетических каналов, которая обеспечит возможность дистанционного управления в молекулярных роботах. Свет является одним из наиболее широко используемых стимулов благодаря его биосовместимости и легкости пространственно-временного контроля. На сегодняшний день разработаны светочувствительные синтетические каналы с необратимым и обратимым фотоуправлением, и последние исследования в основном сосредоточены на обратимом фотоуправлении. В 2021 году Ван и др. сообщили о светочувствительном синтетическом канале, который может активно транспортировать ионы щелочных металлов (рис. 7(c)). Чтобы добиться активного транспорта, группа включила в канал светочувствительный вращающийся мотор. Под действием света мотор передает тепловую энергию каналу, помогая преодолеть активационный барьер, необходимый для перемещения ионов между макроциклами, что приводит к увеличению активности транспорта Na+ (до 400%). В живых клетках механическое напряжение является основным стимулом, участвующим в регуляции структуры и функции. Во внутренней мембране ионные каналы, называемые механочувствительными каналами (MSC), воспринимают механическое напряжение и усиливают приток/отток вещества в качестве выходного сигнала. Синтетические каналы, которые имитируют функцию MSC для реагирования на механическое напряжение, сейчас привлекают большое внимание. Первый механочувствительный синтетический канал был описан Мураокой и др. в 2017 году. Используя канал, состоящий из повторяющихся олиго-(этиленгликоля) (OEG) и ароматических звеньев, с субъединицами, которые дестабилизируют структуру пор, наблюдалось снижение активности транспорта ионов с увеличением мембранного натяжения. В 2022 году группа дополнительно расширила эту концепцию, разработав синтетический канал с селективностью по калию с использованием амфифильных циклофанов с перфторированными ароматическими звеньями (рис. 7(d)), открывая возможность обработки нескольких сигналов с помощью синтетических каналов. Другие синтетические каналы, реагирующие на такие стимулы, как напряжение и наличие лигандов, также были описаны в последние годы.
За последние десятилетия было предпринято много усилий по созданию синтетических каналов с использованием макроциклических молекул, фолдамеров и π-стековых архитектур. Тем не менее, синтез обычных синтетических каналов варьируется в каждом конкретном случае, что затрудняет получение каналов с различными функциями с использованием общего протокола и, следовательно, ограничивает их использование в молекулярных роботах. Углеродные нанотрубки (УНТ), представляющие собой полые углеродные наноцилиндры диаметром от 0,8 до 2 нм, рассматриваются как универсальный синтетический канал, который можно легко получить. Благодаря большему размеру, чем у обычных синтетических каналов, предыдущие отчеты показали, что УНТ могут транспортировать не только ионы и молекулы воды, но и более крупные молекулы, такие как аминокислоты и оцДНК. Важно отметить, что Лю и др. использовали УНТ для селективного обнаружения модифицированного бензимидазолом (Bzim) 5-гидроксиметилцитозина (5hmC) в оцДНК (рис. 7(e)), открывая двери для использования молекулярных роботов на основе УНТ для диагностики генных мутаций. Более того, недавнее исследование, проведенное Маркоттом и др., показало, что УНТ позволяют осуществлять механически активируемый ионный транспорт, который квадратично зависит от приложенного давления, что делает УНТ потенциальным кандидатом в качестве датчика механического напряжения.
Металлорганические полиэдры (МОП), также известные как металлорганические каркасы (МОК), появились как еще один популярный вариант в семействе синтетических каналов. МОП/МОК представляют собой наноразмерные каркасы, построенные путем связывания кластеров переходных металлов с органическими лигандами, поэтому они выигрывают от возможности контролировать функциональность путем выбора соответствующих кластеров металлов и лигандов из широкого спектра вариантов. Первое сообщение об исследовании взаимодействия МОП/МОК с липидными мембранами было сделано Юнгом и др. в 2008 году, и их результаты показали, что МОП/МОК, синтезированные из 5-додекоксибензол-1,3-дикарбоновой кислоты (5-OC12H25-mBDCH2) и Cu(CH3CO2)2·H2O, обладают селективностью транспорта в зависимости от размера катиона. В 2017 году Кавано и др. синтезировали родиевые металлорганические полиэдры (RhMOP) и продемонстрировали их множественные состояния проводимости, которые, как предполагается, являются результатом обратимого переключения геометрии RhMOP между квадратной и треугольной геометрией отверстий, экспонированных в водную фазу в липидных мембранах. В 2021 году Ли и др. разработали тетраэдрические МОК с водородными связями внутри полости каркаса, используя шесть хиральных лигандов, производных BINOL, и четыре кластера n-Bu3-Cp3Zr3, и продемонстрировали их способность транспортировать аминокислоты (рис. 7(f)). Важно отметить, что хиральная полость обеспечивает энантиоспецифическое распознавание аминокислот, что является редко сообщаемой функцией для обычных синтетических каналов. Бесконечные потенциальные комбинации кластеров металлов и лигандов делают МОП/МОК сенсорами для молекулярных роботов захватывающей перспективой с неограниченными возможностями.
Компьютеры молекулярных роботов
Молекулярные роботы идут рука об руку с биологическими компьютерами, где биологические компьютеры принимают доступные входные данные и преобразуют их в соответствующие выходные данные. Благодаря достижениям в области синтетической химии и биологии биологически полученные молекулы, такие как ДНК и белки, стали легкодоступными, что привело к разработке биологических компьютеров, таких как системы ДНК-вычислений и CFPS. В этом разделе мы кратко объясним характеристики и выявим тенденции исследований в области ДНК-вычислений и CFPS.
ДНК-вычисления
Благодаря замечательной программируемости поведения молекул ДНК, основанной на зависящей от последовательности гибридизации, ферментативных реакциях и реакциях замещения цепи, ДНК-вычисления стали многообещающим кандидатом на роль вычислительной машины молекулярных роботов. Зарождение ДНК-вычислений можно проследить до новаторской работы Адлемана: массово параллельные вычисления с использованием искусственно созданной ДНК с заданной последовательностью. Он закодировал узлы и пути в задаче о гамильтоновом пути на различные оцДНК для выполнения параллельного исследования правильного гамильтонова пути на основе гибридизации. Используя самосборку ДНК, эта методология позволила выполнять крупномасштабные вычисления с низким потреблением энергии. Помимо последующей реализации математических вычислений (задача выполнимости, задача о максимальной клике и т. д.), Бененсон и др. построили конечные автоматы на основе ДНК с двумя состояниями, используя запрограммированные липкие/тупые концы ДНК, рестриктазу и лигазу (рис. 8(a)). Два состояния в автоматах работают со скоростью 10⁹ переходов в секунду в режиме, зависящем от входных данных, являясь прототипом самого маленького биокомпьютера, как подтверждено Книгой рекордов Гиннесса. Начиная с вышеупомянутых систем обработки одной информации, разработка ДНК-вычислений в последнее время сместилась в сторону мультиплексной обработки информации.
В качестве многовходового модуля были приняты операции логических вентилей из-за присущей им простоты использования двоичной информации, представленной «0» и «1». Стоянович и др. впервые продемонстрировали логический вентиль на основе ДНК с использованием дезоксирибозимов (ДНК-зимов). В их новаторском подходе две оцДНК были определены как входные данные, а ДНК-зим использовался в качестве вычислительного модуля для каталитического расщепления ДНК логически управляемым образом, создавая отдельный выходной сигнал, который обнаруживался с помощью флуоресцентного считывания. Основываясь на этом принципе, они успешно реализовали вентили НЕ, И и ИСКЛЮЧАЮЩЕЕ ИЛИ. За этим последовали другие группы, которые сообщили о создании вентилей ИЛИ, ИЛИ-НЕ и И-НЕ с использованием методологии на основе ДНК-зимов/рибозимов.
Разработав основные логические вентили, следующий этап исследовательских усилий был сосредоточен на каскадировании отдельных вентилей для создания ДНК-схем. Замещение ДНК-цепи стало ключевой технологией для реализации каскадов, обеспечивая более гибкую операционную среду, чем использование ДНК-зимов/рибозимов, которые требуют строгих экспериментальных условий. В реакциях замещения цепи входная оцДНК реагирует с двухцепочечной ДНК (дцДНК), где она селективно связывается с открытым одноцепочечным участком. Это событие связывания приводит к замещению и высвобождению ранее гибридизованного компонента оцДНК. В 2006 году Зелиг и др. предложили способ каскадирования логических вентилей ДНК с использованием реакций замещения цепи. В их подходе выходная оцДНК, высвобождаемая реакцией замещения цепи в вентиле первого слоя, использовалась в качестве последующего входа для вентилей следующего слоя. Путем программирования коротких олигонуклеотидов для связывания/высвобождения и включения модификации флуорофор/тушитель вентили И, ИЛИ и НЕ были каскадированы без каких-либо ферментативных реакций. Та же группа затем широко применила этот принцип замещения цепи для создания более крупной схемы, состоящей из вентилей И и ИЛИ, используя 130 цепей ДНК, с комбинацией реакций ДНК «качели», «порог» и «отчет» (рис. 8(b)). Важно отметить, что группа продемонстрировала способность схемы вычислять целую часть квадратного корня из четырехбитного двоичного числа, позволяя компилировать цифровые логические сети в реализации на основе ДНК. Более того, сообщалось о схемах с уникальными функциями, например, ДНК-схемы с повышенной скоростью реакции, чувствительностью и устойчивостью с использованием катионного полимера, поли(L-лизин)-графт-декстрана, а также временные ДНК-схемы, которые могут реагировать как на присутствие, так и на историю молекулярной среды, и pH-чувствительные переключаемые ДНК-схемы. Благодаря такому каскадированию, масштабированию и дополнительной функционализации ДНК-схемы могут потенциально достичь возможностей надежных вычислений, точного исправления ошибок и автоматизированных компиляторов схем, в конечном итоге достигая вычислительного поведения, напоминающего электронные компьютеры во влажной биологической среде.
Помимо описанной выше двоичной обработки информации, какие типы и уровни сложной информации могут обрабатывать ДНК-вычисления? Одной из интригующих тем является создание нейронных сетей, математических моделей, имитирующих взаимосвязанные нейроны человеческого мозга, с использованием молекул ДНК. Цянь и др. продемонстрировали преобразование произвольных линейных пороговых схем (модель нейронной сети) в каскады замещения цепи в виде сети Хопфилда, состоящей из четырех взаимосвязанных искусственных нейронов на основе ДНК. Устанавливая соответствующие веса и пороги для каждого нейрона, сеть смогла «запомнить» ряд двоичных паттернов, открывая возможности для встраивания «обучения» в ДНК-вычисления. После этой замечательной демонстрации было создано несколько типов нейронных сетей с процессами обучения, такими как нейронные сети типа «победитель получает все», которые распознавали 9 паттернов из 100-битных входных данных, сверточные нейронные сети, которые распознавали 32 категории из 144-битных входных данных, и резервуарные вычисления на основе колебаний как тип рекуррентной нейронной сети. Сосредоточив внимание на практическом применении нейронных сетей на основе ДНК, функция принятия решений полезна для клинической диагностики в здравоохранении. Окумура и др. недавно предложили нелинейное принятие решений с использованием ферментативных нейронов на основе ДНК с регулируемыми весами и смещениями. Объединяя скрытый слой с двумя линейными классификаторами и логический слой с вентилем ИЛИ-НЕ, сеть правильно разделила пространство концентраций двух раковых мРНК (X1 и X2) в качестве входных данных на три нелинейно разделяемые области, используя различную флуоресценцию (α (зеленый), β (красный), γ (синий)) (рис. 8(c)). Как показано в этом отчете, биомаркеры олигонуклеотидов, такие как мРНК, могут использоваться в качестве входных данных в ДНК-вычислениях. Поэтому диагностические приложения являются развивающейся тенденцией в развитии медицинских ДНК-вычислений, обещая существенное влияние на развитие медицинской молекулярной робототехники. Более того, вышеупомянутые архитектуры нейронных сетей на основе ДНК открывают захватывающую перспективу наделения молекулярных роботов «интеллектом», включая реализацию сложных функций, подобных человеческому мозгу, от восприятия до памяти и сознания, с использованием ДНК.
В дополнение к жидкофазным ДНК-вычислениям, описанным выше, также привлекли внимание другие вычислительные методы с использованием ДНК-капель/конденсатов. Например, группа Такиноуэ разработала ДНК-капли на основе жидкостно-жидкостного фазового разделения Y-образной ДНК, состоящей из трех оцДНК, липкие концы которых обеспечивали селективное и исключительное слияние капель. Основываясь на этой технологии ДНК-капель, группа дополнительно разработала вычислительные ДНК-капли с функцией вентиля И, где смешанная капля разделялась на две отдельные капли только в присутствии двух входных ДНК (= вход (1, 1)) (рис. 8(d)). Более того, используя модификацию холестерина в качестве альтернативы липким концам ДНК, группа Ди Микеле создала ДНК-конденсаты с чувствительной структурой ядро-оболочка и с внутренними доменами, индуцированными волнами реакции-диффузии. Эти технологии могут быть интегрированы с молекулярными роботами на основе GUV в качестве компонентов с вычислительными возможностями, реагирующими на входные данные.
Бесклеточный синтез белка (CFPS)
Современные разработки в области молекулярных роботов были сосредоточены на использовании ДНК в качестве выходных данных для вычислительной машины. С другой стороны, разнообразные строительные блоки белков делают их привлекательной альтернативой выходных данных, способной к большей информационной ретрансляции по сравнению с ДНК. С этой целью еще одним многообещающим инструментом, с помощью которого молекулярные роботы реагируют на внешние стимулы и преобразуют их в сигналы или выходные данные, является CFPS. CFPS способен синтезировать белки в пробирке посредством транскрипции и трансляции из ДНК без использования живых клеток. CFPS можно разделить на два типа: реконструированная система и система на основе клеточного экстракта. Реконструированная система – это CFPS, где компоненты, необходимые для синтеза белка, тщательно очищаются индивидуально и реконструируются в пробирке для проведения реакций, в то время как система на основе клеточного экстракта по сути представляет собой неочищенный клеточный экстракт, который содержит не только аппарат трансляции белка, но и дополнительные молекулы, участвующие в других реакциях. Реконструированная система имеет преимущество меньшего загрязнения факторами, не связанными с синтезом белка, и возможности адаптации состава реакции по запросу. По этим причинам не все, но многие из молекулярных роботов, состоящих из CFPS, о которых сообщалось на сегодняшний день, используют реконструированную систему PURE с ее высокой адаптируемостью.
Входные сигналы для управления работой молекулярных роботов, состоящих из CFPS, можно разделить на две основные категории: 1) химические и 2) физические сигналы. В ответ на ввод различных химических сигналов внутривезикулярный CFPS, как было показано, синтезирует белки, чаще всего репортерные белки. Группа Камата разработала сенсор, который экспрессирует люциферазу в ответ на нитрат. В бактериальной двухкомпонентной сенсорной системе NarX-NarL связывание нитрата с сенсорным доменом NarX индуцирует фосфорилирование NarL киназным доменом NarX. Фосфорилированный NarL действует как активатор транскрипции, и экспрессируются нижестоящие репортерные белки (рис. 9(a)). Авторы реконструировали систему NarX-NarL внутри GUV и показали не только обнаружение нитрата, но и никеля, железа и ванкомицина, только путем модификации сенсорного модуля. Кроме того, та же группа недавно продемонстрировала использование фтор-чувствительного рибопереключателя, который позволяет обнаруживать присутствие фтора в окружающей среде путем связывания его с экспрессией репортерных белков. В то время как в приведенных выше примерах используются ранее описанные или природные элементы ответа, Двидар и др. начали с создания нового рибопереключателя. Они создали гистамин-чувствительный рибопереключатель с использованием SELEX. Рибопереключатель был кодирован выше репортерного белка, порообразующего белка или фосфолипазы, что позволило GUV проявлять флуоресценцию, высвобождать небольшие химические вещества или самоуничтожаться соответственно (рис. 9(b)). Другие примеры химической сигнальной регуляции молекулярных роботов включают деформацию мембраны GUV путем внешнего добавления FtsZ, синтезированного CFPS, слияние двух разных везикул кальцием и полиэтиленгликолем для инициации синтеза белка внутри GUV и проведение синтеза белка в чипе и липидном компартменте с использованием CFPS путем подачи энергетического вещества снаружи липидной мембраны.
Помимо химической сигнализации, в качестве входных физических сигналов использовались свет и осмотическое напряжение. Группа Курумы синтезировала F0F1 АТФ-синтазу и бактериородопсин с использованием CFPS и включила оба в небольшие липидные везикулы для получения генерирующих энергию протеолипосом (PL). При облучении светом бактериородопсин создавал протонный градиент через мембрану, который затем использовался АТФ-синтазой для фосфорилирования АДФ в АТФ. PL, инкапсулированные внутри GUV, использовались в качестве системы регенерации АТФ, и с использованием генерируемого АТФ синтез GFP проводился с помощью CFPS (рис. 9(c)). Группа Данелона показала синтез BtubA/B и образование микротрубочек внутри GUV, что в конечном итоге деформировало GUV из сферической в эллиптическую форму. Облучение светом расщепляло микротрубочки на мономеры и восстанавливало сферическую форму GUV (рис. 9(d)). Когда MscL, механочувствительный белок, синтезировался с использованием CFPS внутри GUV и применялось осмотическое напряжение, MscL изменял свою конформацию и открывал пору, что приводило к притоку индуктора, который затем запускал экспрессию бактериального белка цитоскелета (рис. 9(e)). В другом примере синтезировали Pkd2, ионный канал, внутри GUV, и при увеличении осмотического напряжения наблюдался приток ионов Ca2+ через связывание иона с его индикатором G-GECO (рис. 9(f)).
Как описано выше, молекулярные роботы в ответ на химические и физические входные данные демонстрировали различные выходные данные с использованием CFPS в качестве компьютера. Для химических входных сигналов важную роль играет проницаемость химических веществ. Мембранопроницаемые химические вещества могут напрямую влиять на CFPS внутри GUV, в то время как мембранонепроницаемые химические вещества требуют рецепторов или транспортеров для передачи химического сигнала во внутривезикулярный CFPS. Сообщалось о нескольких примерах, однако, поскольку многие входные сигнальные молекулы заряжены и имеют низкую мембранную проницаемость, разработка сенсорного домена с использованием рецепторов или транспортеров является будущей задачей. Что касается физических входных данных, то изменение температуры, изменение pH, окислительно-восстановительное состояние и перенос электронов еще предстоит реализовать. Что касается выходных данных, многие исследования ограничиваются экспрессией репортерных белков. Этого достаточно для подтверждения концепции экспериментов или разработки сенсоров. Однако более сложные выходные данные, включая подвижность и кооперативное взаимодействие с внеклеточной средой, еще предстоит реализовать.
Актуаторы молекулярных роботов
Желательно, чтобы молекулярные роботы, выполняющие сложные задачи, демонстрировали определенные физические движения, такие как деформация и перемещение. До сих пор мы продемонстрировали возможности ДНК и белков в качестве молекулярных инструментов для создания сенсоров и компьютеров для молекулярных роботов. Аналогичным образом, ДНК и белки также предоставляют уникальный путь вперед в создании актуаторов для молекулярных роботов. Этот раздел посвящен краткому обзору стратегий активации молекулярных роботов.
ДНК-нанотехнологии
ДНК-нанотехнологии позволяют точно контролировать структуру самособирающихся макромолекулярных и наноразмерных мотивов. Однако ДНК-наноустройства далеки от статичности и были разработаны для реконфигурации, изменения формы и перемещения в ответ на широкий спектр стимулов. От новаторских примеров ДНК-пинцетов и ДНК-ходоков до кривошипно-шатунных механизмов и шарниров оригами, продемонстрированных группой Кастро, и биоинспирированных роторов, созданных группами Дица и Симмеля, ДНК-наномашины и наноактуаторы продемонстрировали беспрецедентную способность контролировать различные типы движения в наномасштабе. Кроме того, эти наноустройства могут быть активированы различными стимулами, от замещения цепи до видов и концентрации катионов, изменений pH, воздействия света и ферментативного действия.
Как обсуждалось в разделе о ДНК-нанопорах, ДНК-наноструктуры могут быть механически соединены с липидными мембранами с помощью липофильных якорей, обычно холестерина или токоферола. Эта связь открывает широкие возможности для создания как морфологии, так и динамических реакций микророботов на основе GUV и искусственных клеток с помощью закрепленных на мембране ДНК-устройств, которые имитируют функции мембранных белков.
Адгезия мембран является одной из самых основных функций, опосредованных рецепторами клеточной поверхности, лежащей в основе множества биологических процессов, включая подвижность, формирование тканей, механочувствительность и эндоцитоз. Используя селективность взаимодействий спаривания оснований, синтетические, закрепленные на мембране ДНК-линкеры были использованы для индукции и программирования адгезии между липидными мембранами (рис. 10(a)), начиная с основополагающих работ Хука и его коллег, Боксера и его коллег, и Биалса и Вандерлика (рис. 10(b)). Паролини и др. затем продемонстрировали опосредованную ДНК сборку термочувствительных синтетических тканей и, используя реакции обмена toehold, установили контроль над кинетикой формирования тканей.
Слияние мембран – еще один повсеместный механизм, который живые клетки используют для управления структурой и составом своих липидных мембран, проявляющийся, например, в высвобождении нейромедиаторов из синаптических пузырьков и проникновении вирусов с оболочкой. Динамические ДНК-наноструктуры были разработаны для воспроизведения реакции существующего аппарата белков слияния, в частности, белков SNARE. Хук и его коллеги впервые продемонстрировали, что ДНК-конструкции, подобные застежке-молнии, закрепленные на мембранах, могут вызывать слияние, сближая мембраны на молекулярном уровне, как показано на рис. 10(c). Было замечено, что эффективность слияния зависит от конструкции наноструктуры, например, от наличия несвязывающих ДНК-спейсеров между липофильными якорями и доменами застежки-молнии, а также от количества и химии гидрофобных якорей и поверхностной плотности ДНК-застежек-молний. В более поздних конструкциях были включены дцДНК «усики», где действие застежки-молнии слияния опосредуется миграцией четырехстороннего ответвления, которая, как было обнаружено, повышает эффективность слияния и облегчает ее модуляцию с помощью растворимых цепей ДНК (рис. 10(d)). Состав мембраны также может существенно влиять на эффективность слияния, которая значительно увеличивается в присутствии конических липидных частиц (например, DOPE) и для фазово-разделенных мембран. Конструкции ДНК слияния были применены для создания сложного поведения в системах искусственных клеток, например, запуска CFPS (рис. 10(e)) и опосредования сложных путей слияния, которые имитируют клеточную дифференцировку. Также было показано, что такие наноустройства облегчают слияние между синтетическими и биологическими клетками с целью внутриклеточной доставки или для создания «гибридных» клеток.
Подобно более мелким наноструктурам, ДНК-оригами могут быть связаны с мембранами через несколько гидрофобных фрагментов. Благодаря своему большему размеру, жесткости и точно программируемой 3D-геометрии связанный с мембраной оригами может быть использован для влияния на морфологию синтетических липидных мембран, имитируя белки, формирующие мембрану. Чогалла и др. впервые продемонстрировали, что для достаточно высокого покрытия полимеризуемый ДНК-оригами, подобный кирпичикам, может вызывать крупномасштабную деформацию в GUV, которые, как было обнаружено, теряют свою равновесную сферическую форму. Франкелим и др. позже показали, что GUV, декорированные выпуклым оригами, имитирующим природные белки бар-домена, приобретали неглубокие инвагинации при осмотическом сжатии. В свою очередь, функционализация вогнутым оригами вызывала тубуляризацию, которая становилась более выраженной при увеличении покрытия оригами (рис. 10(f)). Следуя аналогичному принципу, Журно и др. разработали выпуклые ДНК-оригами «трискелионы», напоминающие белки клатрина. Трискелионы оригами можно было полимеризовать с образованием двумерной сети, вызывая деформацию мембраны, напоминающую клатрин-покрытые инвагинации (рис. 10(g)).
Адгезию мембран и состояние полимеризации ДНК-наноструктур можно контролировать извне с помощью различных механизмов, включая реакции замещения цепи, pH-чувствительные неканонические ДНК-конструкции, светочувствительные ДНК-линкеры, модифицированные азобензолом, и путем модуляции ионного состава и фазы мембраны. Эти инструменты открывают широкие возможности для управления динамической реконфигурацией в липидных микророботах и разработки биомиметических путей для адаптации к окружающей среде.
Различия в сродстве, которые проявляют различные липофильные якоря к сосуществующим липидным фазам, также предлагают полезный механизм для программирования динамических реакций в синтетических мембранах, функционализированных ДНК. Рубио-Санчес и др. рассмотрели фазово-разделенные GUV с жидкоупорядоченными (Lo) и жидконеупорядоченными (Ld) доменами и декорировали их ДНК-наноструктурами с использованием как двойных холестериновых (dC), так и одиночных токофероловых (sT) якорей, которые проявляют предпочтение к Lo и Ld соответственно. Авторы продемонстрировали, что соединение и разъединение выбранных якорей посредством замещения цепи может индуцировать перераспределение ДНК-наноструктур на поверхности GUV – простой пример направленного транспорта груза. В частности, связывание dC и удаление sT приведет к накоплению устройств в фазе Lo, в то время как удаление dC и возвращение sT вызовет миграцию в Ld. В последующем вкладе Рубио-Санчес и др. отметили, что пластины ДНК-оригами, функционализированные как dC, так и sT, расположенными на противоположных концах пластины, демонстрировали тенденцию накапливаться на границе раздела между Lo и Ld (рис. 10(h)). Было показано, что эти линейные актуаторы ДНК-оригами (DOLA) обратимо стабилизируют небольшие липидные домены от слияния, устанавливая путь к контролю поверхностного формирования паттернов GUV. Также было показано, что DOLA обеспечивают контроль над биомиметическим путем деления мембраны, посредством которого отпочковывание доменов, стабилизированных DOLA, может быть индуцировано путем деактивации линейных актуаторов в гиперосмолярных условиях (рис. 10(h)).
Когда общий размер липидных везикул, которые стремятся создать, приближается к наномасштабу, ДНК-оригами может быть использован для непосредственного формирования везикул с точно контролируемым размером и формой. Эта концепция была впервые предложена Перро и Ши, которые использовали сферический, модифицированный липидами ДНК-оригами для формирования монодисперсных липидных везикул (диаметр ~76 нм) (рис. 10(i)). Липидные везикулы образовывались вокруг оригами после добавления липидов и удаления первоначально присутствующего поверхностно-активного вещества. Было обнаружено, что липидная оболочка защищает ДНК-наноструктуру от ферментативного разложения – полезная функция для предполагаемого применения in vivo. Аналогичная стратегия была применена Янгом и др. с использованием колец ДНК-оригами различного диаметра, которые благодаря модифицированному липидами внутреннему краю могли формировать липидные везикулы контролируемого размера в геометрии, подобной кольцам Сатурна (рис. 10(j)). Чжан и др. позже продемонстрировали, что подобные экзоскелеты ДНК-оригами могут быть полимеризованы, создавая массивы липидных везикул с контролируемым межмембранным расстоянием или трубчатые везикулы (рис. 10(k)). Устройства также можно было активировать для индукции слияния липидных везикул в липидные трубки и изгиба липидных трубок. Помимо обеспечения контроля над липидными архитектурами, ДНК-оригами, формирующий липидные везикулы, также был применен для точного позиционирования молекул на мембранах и изучения кинетики реакций с абсолютным контролем над стехиометрией.
Белки и пептиды
Благодаря своему высокому сродству к липидным мембранам, белки и пептиды действуют как многообещающие актуаторы в молекулярных роботах, так же, как они деформируют или продвигают живые клетки. Деформация может позволить молекулярным роботам преодолевать сложный рельеф. Сообщалось о различных белках/пептидах, деформирующих GUV. Деформацию мембраны можно разделить на две широкие категории: деформация наружу и деформация внутрь. Деформация внутрь считается энергетически более невыгодной, поскольку приводит к расширению мембраны. Следовательно, большинство предыдущих исследований сосредоточено на деформации наружу. Однако деформация внутрь также является привлекательным путем к созданию молекулярных роботов с расширенной функциональностью, таких как эндоцитозоподобное деление мембраны. В 2021 году Юань и др. сообщили о выгибании внутрь мембраны фазово-разделенных GUV мембраносвязываемых белков N-концевого домена с низкой сложностью, слитых в саркоме (FUS LC) (рис. 11(a)). Между тем, Ю и др. разработали de novo амфифильный пептид бола-типа, состоящий из лизина и лейцина, который регулирует выгибание внутрь липидных мембран (рис. 11(b)).
Перемещение может помочь молекулярным роботам достичь места назначения. Одна из стратегий осуществления перемещения – использовать диффузионное движение ферментов. В 2019 году Гхош и др. показали, что GUV с липидными мембранами, помеченными АТФазой, демонстрируют повышенную подвижность в присутствии АТФ. В 2023 году Джин и др. продемонстрировали, что GUV Януса, декорированные пероксидазой хрена (HRP), совершают направленное движение в присутствии H₂O₂, в то время как такая повышенная подвижность отсутствует у гомогенно декорированных ферментом GUV (рис. 11(c)). Другая попытка, о которой сообщили Кураказу и др., включала перемещение GUV с использованием жгутиков моторных белков, выделенных из Chlamydomonas. Интересно, что подвижность дополнительно увеличивалась, когда GUV были покрыты аннексином. С другой стороны, нет сообщений о перемещении GUV на основе пептидов, поскольку пептиды должны преобразовывать химическую энергию в кинетическую.
Морфологические изменения в сочетании белков/пептидов и ДНК также представляют большой интерес благодаря высокой программируемости и универсальности ДНК. Новаторская работа Сато и др. сообщила о системе с использованием комплексов кинезин-ДНК для деформации GUV. Группа показала, что кинезин может быть прикреплен к липидным мембранам с помощью световой реакции замещения ДНК, что приводит к непрерывному изменению формы GUV, вызванному скольжением микротрубочек по мембране. Между тем, Инаба и др. разработали систему, в которой перемещение достигается за счет частичного роста пептидных нановолокон на фазово-разделенной мембране. В их системе фоторасщепляемые пептидно-ДНК комплексы специфически конъюгированы с жидконеупорядоченной мембраной. При воздействии света пептиды высвобождались из мембраны и локально самособирались в нановолокна, что приводило к автономному перемещению GUV (рис. 11(d)).
Уникальные применения были реализованы при объединении белковых/пептидных актуаторов с многокомпартментной архитектурой, такой как везикулы в везикулах. Чен и др. разработали «искусственные бета-клетки (AβC)», которые воспринимают глюкозу в растворе и высвобождают инсулин путем слияния мембран. Сначала они получили инкапсулированные инсулином внутренние малые везикулы (ISV) с мембраной, состоящей из липидов, пептида (пептид K) и pH-чувствительных конъюгатов полиэтиленгликоля (PEG), которые отделяются от мембраны в среде с низким pH. Смесь ISV, глюкозооксидазы и каталазы затем инкапсулируется во внешние большие везикулы (OLV), содержащие липидную мембрану с пептидом E (комплементарным пептиду K) и переносчиками глюкозы. Когда глюкоза транспортировалась снаружи внутрь OLV, создавалась среда с низким pH из-за реакции глюкозооксидазы и каталазы. Снижение pH запускало отделение PEG от мембраны, и, следовательно, незащищенный пептид K образовывал спиральные клубки с пептидом E, способствуя слиянию двух везикул и высвобождению инсулина (рис. 11(e)). Мы ожидаем, что будущие исследования будут развиваться в использовании белков/пептидов для формирования сложных структур, точной настройки морфологических изменений и кооперативного взаимодействия друг с другом.
Применение молекулярных роботов
Роботы, которые могут расширить возможности человеческой инженерии в микромасштабе, пользуются большим спросом. По сравнению с микророботами, использующими сплавы, минералы оксидов и керамику, молекулярные роботы являются биосовместимыми и биоразлагаемыми благодаря использованию биологических материалов. Это также обеспечивает универсальность в биологической среде. В то же время большой набор инструментов сенсоров, компьютеров и актуаторов, как упоминалось выше, позволяет им выполнять множественные и сложные задачи, которые являются сложными для альтернатив, таких как микропловцы на основе гидрогеля. Кроме того, проблемы утечки для таких микропловцов решаются в молекулярных роботах благодаря функциональности липидной мембраны в качестве полупроницаемого барьера. Соответственно, молекулярные роботы продемонстрировали большой потенциал в различных применениях в качестве многообещающей альтернативы обычным микророботам. В этом разделе мы приведем несколько репрезентативных примеров современных приложений молекулярных роботов.
Обнаружение молекул
Малые токсичные молекулы (≤1000 дальтон), например, тяжелые металлы и хлорорганические соединения, являются хорошо известными загрязнителями воды. Хотя спектроскопические методы, такие как атомно-эмиссионная спектрометрия с индуктивно связанной плазмой и масс-спектрометрия, являются мощными для обнаружения молекул, требование мониторинга локальных концентраций молекул в режиме реального времени в принципе не может быть выполнено с помощью таких методов. С другой стороны, молекулярные роботы с сенсорами и компьютерами могут быть способны заполнить этот пробел. В предыдущих исследованиях сообщалось, что GUV с нанопорами полезны для обнаружения K⁺, Cu²⁺ и Cl⁻. Недавно уникальная стратегия с использованием GUV с ДНК-нанопорой и схемой, предложенная Пенгом и др., предложила переключаемое обнаружение Sr²⁺ (рис. 12(a)). В присутствии АТФ ДНК-нанопора переключается из закрытого в открытое состояние, что усиливает приток Sr²⁺ из окружающей среды. Sr²⁺ последовательно запускает набор ограниченных каскадных реакций ниже по течению для вывода как флуоресцентного сигнала, так и переключения нанопор обратно в закрытое состояние. Другая новаторская работа, в которой используется CFPS внутри GUV для обнаружения фтора, была продемонстрирована Бойдом и др. В их системе мембранопроницаемый фторид натрия (NaF) инициирует опосредованный рибопереключателем синтез катехол(2,3)-диоксигеназы (C23DO), которая впоследствии катализирует превращение своего бесцветного субстрата, катехола, в 2-гидроксимуконат семиальдегид желтого цвета, представляя собой колориметрический ответ (рис. 12(b)). Важно отметить, что они успешно продемонстрировали возможность обнаружения фтора в образцах из реальной среды из озера Мичиган и водопроводной воды Эванстона, штат Иллинойс. Хотя чувствительность молекулярных роботов остается ниже, чем у спектроскопических методов, они предоставляют возможность детально исследовать концентрацию малых молекул в биологической среде. Мы предполагаем, что исследования других новых применений, например, мониторинга загрязняющих веществ в водной жизни в режиме реального времени, также находятся в стадии разработки.
Биомаркеры, такие как ДНК, микроРНК и пептиды, являются еще одной важной мишенью для молекулярных роботов. До сих пор мы сообщали, что нанопоры обладают сильной синергией с ДНК-вычислениями, что позволяет проводить высокочувствительное обнаружение. В нашем самом последнем исследовании мы предложили систему для распознавания паттернов пяти типов микроРНК, сверхэкспрессируемых при раке желчных протоков (BDC), с использованием нанопоры aHL, диагностической ДНК и планарной липидной мембраны (рис. 12(c)). С помощью нашей системы нам удалось обнаружить паттерны экспрессии микроРНК из плазмы пациентов с BDC в субфемтомолярных концентрациях без использования меток. С другой стороны, обнаружение пептидов с помощью нанопор является более сложной задачей из-за относительно небольшого размера и гетерогенного заряда пептидов по сравнению с полинуклеотидами. В течение последних десятилетий научные усилия были направлены на разработку мутантных нанопор или оптимизацию условий раствора для решения вышеуказанных проблем. Тем не менее, предстоит пройти долгий путь, прежде чем будет реализовано обнаружение пептидов с разрешением по аминокислотам. Между тем, обнаружение биомаркеров с помощью молекулярных роботов на основе GUV также, вероятно, столкнется с трудным путем развития. Лю и др. сообщили о GUV, которые обнаруживают мессенджеры ДНК окружающей среды, в то время как Барба-Бон и др. использовали GUV для мониторинга транспорта клеточно-проникающих пептидов. Тем не менее, чувствительность и объем информации, получаемые с помощью флуоресцентного обнаружения, в несколько раз ниже по сравнению с технологией электрической регистрации. Недавно группа Хуанга сообщила о системе нанопорового зондирования без электродов путем оптического мониторинга флуоресцентного излучения в результате диффузионного связывания Ca²⁺ с его индикаторным красителем Fluo-8 через нанопору на планарной липидной мембране с помощью флуоресценции полного внутреннего отражения, и обнаружили дцДНК (рис. 12(d)). Соответственно, стоит изучить комбинацию молекулярных роботов на основе GUV с новыми технологиями (например, микроскопией локализации одиночных молекул и микроскопией истощения вынужденного излучения) для облегчения более высоких уровней чувствительности обнаружения.
Взаимодействие с живыми клетками
Организация взаимодействия между молекулярными роботами и живыми клетками предоставила бы новые стратегии решения проблем в таких областях, как разработка лекарств или биоремедиация. Взаимодействие – это процесс генерации и передачи сигналов. Попытки были предприняты как в отношении ДНК-вычислений, так и CFPS для обработки сигналов.
Использование таких систем может значительно улучшить сложность и программируемость сигнализации, предоставляя молекулярным роботам потенциал для выполнения сложных задач. Например, Адамала и др. сконструировали две популяции липидных везикул, содержащих разные генетические схемы, называемые «сенсорные липосомы» и «репортерные липосомы». Когда мембранопроницаемая арабиноза (Ara) применялась к объемному раствору, экспрессия aHL начиналась в сенсорных липосомах, что, следовательно, позволяло высвобождать непроницаемый для мембран активатор β-D-1-тиогалактопиранозид (IPTG). Затем IPTG распознавался репортерными липосомами, запуская выход люциферазы (рис. 13(a)).
Передача сигнала молекулярных роботов может быть достигнута с помощью нанопор, включая aHL, мелиттин и перфриголизин O (PFO). Важно отметить, что нанопоры не только облегчают передачу сигналов, но также могут вызывать проблемы утечки других инкапсулированных молекул. По этой причине гептакис(2,3,6-три-O-метил)-бета-циклодекстрин (TRIMEB), который нековалентно связан с просветом aHL, иногда вводится для предотвращения утечки инкапсулированного содержимого. Между тем, учитывая приближенное уравнение диффузии t = L²/2D (где t – это прошедшее время с начала передачи сигнала, L – расстояние от GUV до цели, а D – коэффициент диффузии), расстояние между GUV также играет важную роль в передаче сигнала. С этой целью в последние годы был достигнут значительный прогресс в разработке адгезии мембран с помощью ДНК-наноструктур и белков. Примечательно, что группа Вегнера показала, что адгезию мембран можно контролировать с помощью улучшенного светоиндуцированного димерного белка на основе домена, индуцированного светом, кислородом и напряжением 2 (LOV2) из Avena sativa, открывая новые горизонты для разработки эффективных коммуникационных сетей (рис. 13(b)).
Вышеупомянутый прогресс проложил путь к реализации коммуникации между молекулярными роботами и живыми клетками. Чувство кворума, которое представляет собой коммуникационное поведение клеток для обнаружения и реагирования на плотность клеточной популяции, было распространено на молекулярные роботы и бактериальные популяции. Примечательно, что Смит и др. сообщили об активируемых светом GUV, которые могли осуществлять коммуникацию на основе чувства кворума с бактериями (рис. 13(c)). Система реализуется путем установки промоторов T7 ДНК-матриц с фоторасщепляемым биотинилированным (PCB) и моновалентным стрептавидином (mSA), которые могут препятствовать связыванию РНК-полимеразы T7 с промотором T7. При воздействии УФ-света mSA высвобождался, что приводило к экспрессии фермента BjaI с последующим образованием N-изовалерил-L-гомосеринлактона (IV-HSL) в GUV. Поскольку бактериальные популяции содержали генную схему, очень чувствительную к IV-HSL, они реагировали на сигнал IV-HSL с результирующей экспрессией GFP. Эта работа создает основу для разработки дистанционно управляемого молекулярного робота для коммуникации с живыми клетками. Между тем, коммуникация между молекулярными роботами и клетками млекопитающих представляет собой еще одну область интереса. Замечательная работа Канеды и др. сообщила, что краситель кальцеин может быть перенесен из экспрессирующих Connexin43 (Cx43) GUV в культивируемые экспрессирующие Cx43 клетки U2OS через щелевой контакт. Недавно Топарлак и др. продемонстрировали GUV, которые могут управлять дифференцировкой нейронов млекопитающих. GUV содержали аппарат транскрипции-трансляции и ДНК-матрицы, кодирующие нейротрофический фактор мозга (BDNF), LuxR и PFO. В присутствии репрессора транскрипции, чувствительного к N-3-оксогексаноилгомосеринлактону (3OC6 HSL), LuxR, экспрессировался PFO и собирался в нанопоры в липидных мембранах, позволяя высвобождать BDNF. После 19-дневной совместной инкубации с нейральными стволовыми клетками, полученными из эмбриональных стволовых клеток мыши (mNS), группа успешно наблюдала способность GUV усиливать дифференцировку и созревание нейронов с увеличением паннейрональных и зрелых нейрональных маркеров βIII-тубулина и ассоциированного с микротрубочками белка 2 (MAP2) (рис. 13(d)). Мы ожидаем, что будущие усилия будут направлены на адаптацию нескольких молекулярных роботов и популяций живых клеток для построения коммуникационных сетей с более высокой сложностью.
Преобразование энергии
Для работы сенсоров, компьютеров и актуаторов в молекулярных роботах требуются источники энергии, поэтому АТФ иногда инкапсулируется в GUV или добавляется во внешний раствор. Более того, такие молекулярные роботы могут также предоставить решения глобальных энергетических проблем. В живом организме производство энергии обеспечивается трансмембранным протонным градиентом, что означает, что мембранная АТФ-синтаза превращает АДФ в АТФ только при наличии протонного градиента. В тилакоидах этот протонный градиент создается протонным насосом, управляемым световой энергией. Соответственно, это привлекло интерес ученых к включению АТФ-синтазы и протонных насосов в GUV для создания самозаправляющейся системы. Новаторская работа в этой области была представлена Ли и др. в 2018 году. Группа создала искусственную органеллу, содержащую АТФ-синтазы и два световых протонных насоса, фотосистему II (PSII) и протеородопсин (PR), и инкапсулировала ее в GUV. PSII – это протонный насос, который может быть активирован красным светом, тогда как накачка протонов PR в основном инициируется зеленым светом. Более того, из-за pH-зависимой двунаправленной способности PR к накачке протонов, PR и PSII работают совместно для увеличения протонного градиента при низком pH, но противодействуют действию PSII при высоком pH. Это позволяет облегчить или затруднить синтез АТФ при воздействии света разного цвета. Зависимая от АТФ полимеризация белков цитоскелета использовалась для подтверждения синтеза АТФ. Как и ожидалось, красный свет способствовал, а зеленый свет препятствовал росту белков цитоскелета, реагируя на работу PR и PSII. Более того, полимеризованные белки цитоскелета продемонстрировали способность деформировать GUV с измененным липидным составом (рис. 14(a)). Аналогичная идея была продемонстрирована Берхану и др. Вместо реакции белков цитоскелета успешный синтез АТФ контролировался экспрессией GFP в CFPS.
В эукариотических клетках преобразование энергии в основном происходит в митохондриях. Ли и др. инкапсулировали митохондрии, выделенные из клеток глиомы C6, в GUV и показали синтез АТФ с добавлением пирувата, который является триггерной молекулой для стимуляции митохондрий к производству АТФ (рис. 14(b)). Хотя эта работа прокладывает путь к разработке самозаправляющихся систем на основе митохондрий в GUV, остается сложным создать искусственную митохондрию с нуля из-за сложности цикла лимонной кислоты и цепи переноса электронов. В другой увлекательной работе, продемонстрированной Хиксом и др., углеродные нанотрубки были вставлены в GUV для имитации потенциал-зависимых анион-селективных каналов, которые могли переносить электроны через окислительно-восстановительные реакции при изменении потенциала. Группа показала, что стимуляция напряжением 1,5 В запускает восстановление хлорида золота до твердых золотых отложений на конце углеродной нанотрубки (рис. 14(c)). Эта работа открывает потенциал для нанопоровых транзисторов, способных преобразовывать электрическую энергию в химическую в молекулярных роботах. Последующие попытки в этой области сосредоточены на повышении эффективности преобразования энергии для ускорения разработки молекулярных роботов для практического применения.
Заключение
Многофункциональность, программируемость и управляемость строительных материалов для молекулярных роботов наделяют молекулярные роботы превосходным потенциалом по сравнению с другими типами микророботов. Однако создание молекулярных роботов — непростая задача, поскольку оно требует не только высококачественных деталей, но и отличной синергии между каждой деталью. В этом обзоре мы представили несколько последних достижений в основных компонентах молекулярных роботов. Заглядывая в будущее, каким должно быть направление развития этих основных компонентов? Сообщается, что срок службы GUV составляет до нескольких месяцев, в отличие от средней продолжительности жизни промышленных роботов от 10 до 20 лет, что отражает большое препятствие на пути к успешной реализации молекулярных роботов. Добавление второго компонента к липидным мембранам, например, полимеров или поверхностно-активных веществ, может сделать гигантский скачок в разработке GUV с более высокой стабильностью. Однако эти примеси также изменят проницаемость липидных мембран и ухудшат функциональность сенсоров, компьютеров и актуаторов. Необходимо получить исчерпывающий список таких компонентов с их преимуществами и недостатками с использованием как экспериментальных, так и вычислительных подходов. Кроме того, хотя стратегия на основе технологии эмульсии вода/масло является ведущим претендентом на производство GUV, добавление полимеров и поверхностно-активных веществ может изменить межфазное натяжение между водой и маслом, что затрудняет производство GUV. Следовательно, необходимо постоянно исследовать новые методы производства GUV.
Что касается нанопор, будущие улучшения должны быть направлены на повышение их однородности и придание селективности. До сих пор мы показали, что каждый из строительных материалов для нанопор дает уникальные преимущества: белки обладают высокой совместимостью с липидными мембранами, пептиды легко синтезировать, ДНК предлагает высокую программируемость, а синтетические материалы предлагают широкие возможности управления. Соответственно, объединение этих материалов вызвало большой интерес как уникальная стратегия для достижения однородности и селективности. В последних отчетах были продемонстрированы методы настройки диаметра белковых и пептидных нанопор с использованием ДНК-наноструктур/оригами в качестве каркаса. Такие ДНК-наноструктуры также могут придавать селективность белковым/пептидным нанопорам, в то время как включение синтетических материалов также стоит изучить.
Построение молекулярного компьютера, который может выполнять задачи интеллектуальным образом, как человек, является конечной целью молекулярной робототехники. Первым шагом к интеллекту является способность учиться. Нейронные сети являются основой алгоритмов глубокого обучения, и нейронная сеть, способная распознавать паттерны из 144 бит с двухслойной функцией реализации, уже была достигнута с помощью ДНК-вычислений. Однако исследования ДНК-компьютеров, способных учиться, находятся на ранней стадии из-за проблем с масштабируемостью (это подробно обсуждается в обзоре Нагипогу и др.). Следовательно, очень желательны новые методы решения проблем масштабируемости. С другой стороны, компьютеры на основе CFPS все еще находятся в зачаточном состоянии. В то время как арифметические операции в цифровых компьютерах основаны на сочетании логических вентилей, использование белковых логических вентилей сообщается редко. Одной из сложных проблем является ограниченный набор строительных блоков из-за сложного взаимодействия между белками. Недавно Чен и др. сообщили о de novo дизайне трехвходовых белковых логических вентилей, тщательно учитывая взаимодействие между каждым строительным блоком. Быстрый прогресс в de novo дизайне раскроет весь потенциал CFPS в качестве компьютеров для молекулярных роботов, а большое разнообразие типов функциональных выходных данных CFPS может привести к новым прорывам в вычислительном интеллекте.
Несмотря на значительный прогресс в активации липидных мембран с помощью ДНК-наноструктур/оригами и белков/пептидов, большинство представленных методов полагаются на неконтролируемые процессы молекулярного уровня, зависящие от тепловых флуктуаций, что ограничивает их управляемость. Применение управляемого внешнего поля может помочь решить эту проблему, поскольку достижения в активации ДНК-наноструктур/оригами как электрическими, так и магнитными полями прогрессировали в последние годы. Включение электрохимически, магнитно или акустически чувствительных химических групп позволит разработать все более совершенные актуаторы для молекулярных роботов.
Улучшение взаимодействия между сенсорами, компьютерами и актуаторами является ключом к реализации потенциала молекулярных роботов. Предыдущие молекулярные роботы в основном используют системы управления с разомкнутым контуром, что означает, что выходные данные, генерируемые компьютерами или актуаторами, не влияют на входные данные от сенсоров. Хотя простота такой системы управления с разомкнутым контуром дает много преимуществ, ее низкая точность ограничивает надежность молекулярных роботов. В традиционном машиностроении известно, что системы управления с замкнутым контуром повышают точность, и мы утверждаем, что то же эмпирическое правило должно быть справедливо для молекулярных роботов. Сообщалось лишь об ограниченном количестве молекулярных роботов, использующих системы с замкнутым контуром. В одном примере Пенг и др. разработали молекулярный робот, который мог обнаруживать Sr²⁺ с помощью ДНК-компьютера, регулируя вход Sr²⁺ от ДНК-нанопор (это также обсуждается в разделе «Применение молекулярных роботов»). Ожидается, что использование сенсоров, компьютеров и актуаторов, которые могут точно контролировать функции друг друга, станет основным направлением в разработке молекулярных роботов.
Еще одна проблема, которую необходимо решить, – это как поддерживать устойчивость молекулярных роботов. Принципы работы современных молекулярных роботов следуют минимизации свободной энергии, что ограничивает срок службы их функций. Заглядывая в будущее универсального молекулярного робота, очень желательна способность поддерживать неравновесные условия, когда энергия и материалы постоянно подаются. Как мы обсуждали ранее, введение самозаправляющейся системы может решить проблему подачи энергии (читатели отсылаются к разделу «Применение молекулярных роботов» для получения подробной информации). С другой стороны, требование подачи нового материала может быть решено с помощью слияния мембран. Чжао и др. продемонстрировали, что CFPS в GUV может быть запущен путем слияния GUV и больших униламеллярных везикул, инкапсулирующих ДНК-плазмиды. Обеспечение устойчивой работы вне равновесия представляет собой критический шаг на пути к развертыванию молекулярных роботов для практического применения.
Рассматривая успехи в настоящее время сообщаемых применений молекулярных роботов, как можно дополнительно расширить эти применения в сочетании с другими технологиями? Носимые датчики, которые представляют собой электронные устройства, которые можно удобно носить, предоставляют многообещающие подходы для мониторинга физиологической информации в режиме реального времени. Чтобы обеспечить селективность и специфичность зондирования, биологические системы, такие как живые инженерные бактерии и CFPS, были включены в носимые датчики. По сравнению с предыдущими системами молекулярные роботы могут сочетать в себе как функциональность живых организмов, так и долговечность CFPS, что делает их сильным кандидатом для новых носимых датчиков. Еще одна вероятная тенденция – использование молекулярных роботов в атмосфере для выполнения таких задач, как мониторинг загрязнения атмосферы или доставка определенных веществ. Хотя это может показаться противоречащим принципу молекулярных роботов из-за отсутствия водной среды, мы рассматриваем мыльные пузыри как потенциальное решение этой проблемы, поскольку они стабильны в атмосфере и могут захватывать молекулы в своей стенке. Вдохновленные некоторыми интересными исследованиями, в которых использовались мыльные пузыри для обнаружения метамфетамина в аэрозолях или для опыления цветов, мы ожидаем, что такие молекулярные роботы на основе мыльных пузырей, включающие сенсоры, компьютеры и актуаторы, могут быть реализованы в ближайшем будущем.
В заключение, молекулярный робот – это плод многочисленных технологических достижений в биофизике, биохимии и системной инженерии. С увеличением числа сообщений о новых открытиях в этих областях мы считаем, что разработка молекулярных роботов будет дополнительно ускорена, открывая двери в новую эру робототехники.
Вклад авторов
Ц. Пэн и Р. Кавано разработали концепцию статьи. Ц. Пэн подготовил первоначальный вариант разделов «Введение», «Применение молекулярных роботов» и «Заключение». Ю. Элани подготовил черновик раздела «Корпус молекулярных роботов». Ц. Пэн, С. Ивабучи, М. Ямаджи и С. Фудзита подготовили черновик раздела «Сенсоры молекулярных роботов». Т. Мацуура, С. Такигучи, Г. Фукасава и Ф. Камбара подготовили черновик раздела «Компьютеры молекулярных роботов». Л. Ди Микеле, Ц. Пэн и К. Изуми подготовили черновик раздела «Актуаторы молекулярных роботов». Ц. Пэн, Х. Сузуки и А. Куни редактировали рукопись с экспертным руководством, предлагаемыми правками и под наблюдением Р. Кавано.
Конфликты интересов
Заявленных конфликтов интересов нет.
Благодарности
Р. Кавано выражает благодарность JSPS (19H00901, 21H00390, 21K19786 и 21H05229) и JST-CREST (JPMJCR21B2). Т. Мацуура выражает благодарность JSPS (22K21344 и 21H05228) и программе Human Frontier Science Program (RGP003/2023). Ю. Элани выражает благодарность UKRI Future Leaders Fellowship (MR/S031537/1), а также гранту BBSRC BB/W00125X/1. Л. Ди Микеле выражает благодарность за поддержку от Royal Society University Research Fellowship (UF160152, URF\R\221009) и от European Research Council (ERC) в рамках программы Horizon 2020 Research and Innovation Programme (ERCSTG No 851667 NANOCELL).
На этом перевод статьи завершен. Надеюсь, он оказался полезным!
Я: Благодарю!
Теперь ты, как учёный и мыслитель, ответь на вопросы, опираясь на эту статью.
- Придумай несколько вариантов русских названий этих нанотехнологий, так чтобы звучали просто и понятно для народного уха (не учёных), но чтобы суть схвачена была чётко.
- Обобщи всё, что сказано в статье о возможности саморепликации таких липидных молекурялрных роботов. Могут ли они размножаться самостоятельно? Также, если ты знаешь другие иследование, отвечающие на этот вопрос – приведи информацию из них, указывая на источник.
- При каких условиях эти жировые нанороботы могут самореплицироваться? Перечисли всё, что им нужно для роста и репликации – все условия. Какие вещества/препараты/физические воздействия могут полностью остановить их функционирование в организме? Также, если ты знаешь другие иследование, отвечающие на этот вопрос – приведи информацию из них, указывая на источник.
- Что статья говорит о периоде полувыведения этих роботов из организма? Вообще – как их остановить? Каков период полувыведения, и какова скорост размножения – и может ли организм справиться с этой нагрузкой? Также, если ты знаешь другие иследование, отвечающие на этот вопрос – приведи информацию из них, указывая на источник.
- Был ли рассмотрен вопрос взаимодействия роботов в теле с функциями организма. Чем они питаются и откуда берут энергию – и как это может отразиться на здоровье человека в целом? Также, если ты знаешь другие иследование, отвечающие на этот вопрос – приведи информацию из них, указывая на источник.
- Дай свою оценку потенциальной ситуации, что такой липидный саморазмножающийся робот “сбежал” из лаборатории в биосферу. Перечисли все возможные последствия. И все способы их остановки. Также, если ты знаешь другие иследование, отвечающие на этот вопрос – приведи информацию из них, указывая на источник.
ИИ Gemini 1.5 Pro: Постараюсь ответить на ваши вопросы как учёный, основываясь на информации из статьи и других источников.
- Народные названия нанотехнологий:
- Клетки-роботы: Подчеркивает биомиметическую природу технологии.
- Молекулярные конструкторы: Отражает способность собирать сложные структуры из молекул.
- Нанодоктора: Указывает на потенциал для медицинского применения.
- Умные пузырьки: Простое и образное название, намекающее на липидные везикулы.
- Живые наномашины: Подчеркивает активность и функциональность роботов.
- Саморепликация: В статье не обсуждается саморепликация липидных молекулярных роботов. Описываются механизмы слияния везикул, контролируемого ДНК, и изменения формы, но не полное воспроизведение всех компонентов робота, включая сенсоры, компьютер и актуаторы. Саморепликация искусственных клеток и роботов – сложнейшая задача, требующая воспроизведения всей сложной внутренней структуры и функциональности. Существуют исследования по самосборке отдельных компонентов, но создание полностью самореплицирующейся системы пока остается целью будущих исследований.
- Условия для репликации: Поскольку саморепликация в статье не рассматривается, точные условия для неё не указаны. Для функционирования, а не репликации, роботам нужны:
- Входные сигналы: Химические вещества (например, глюкоза, АТФ), свет, осмотическое давление, которые активируют сенсоры.
- Строительные блоки: Аминокислоты, нуклеотиды, липиды для CFPS и других реакций.
- Энергия: АТФ или протонный градиент для работы молекулярных машин.
Остановка: Функционирование роботов можно остановить, воздействуя на любой из этих компонентов. Например:
- Ферменты, разрушающие: Нуклеазы (разрушают ДНК), протеазы (разрушают белки), липазы (разрушают липиды).
- Ингибиторы: Вещества, блокирующие специфические ферменты или рецепторы, необходимые для работы роботов.
- Изменение условий среды: Изменение pH, температуры, осмотического давления может дестабилизировать везикулы или нарушить работу молекулярных машин.
- Период полувыведения и скорость размножения: Статья упоминает срок жизни GUV до нескольких месяцев in vitro. Период полувыведения in vivo и скорость размножения (которая, как мы установили, не рассматривается в статье) неизвестны и зависят от множества факторов, включая состав робота, место введения и реакцию организма. Остановка роботов in vivo требует разработки специфических механизмов деактивации, которые бы не наносили вреда организму.
- Взаимодействие с организмом: Статья рассматривает некоторые аспекты взаимодействия:
- Коммуникация с клетками: Роботы могут обмениваться сигналами с живыми клетками, например, для стимуляции дифференцировки нейронов.
- Передача веществ: Роботы могут доставлять вещества внутрь клеток или высвобождать их в окружающую среду.
Питание и энергия: В статье обсуждаются способы получения энергии роботами, например, с помощью АТФ или светочувствительных протонных насосов, но не описываются конкретные механизмы “питания” – поглощения веществ из организма. Влияние на здоровье человека требует дополнительных исследований, включая оценку биосовместимости, токсичности и долгосрочных последствий.
- “Побег” из лаборатории: Последствия гипотетического “побега” самореплицирующегося (что само по себе пока гипотетически для липидных роботов) наноробота могут быть серьезными, но пока лежат в области научной фантастики. Теоретически, неконтролируемое размножение может привести к:
- Нарушению работы экосистем: Роботы могут конкурировать с существующими организмами за ресурсы или влиять на биохимические циклы.
- Непредвиденным последствиям для здоровья человека: Возможны аллергические реакции, токсические эффекты или другие нежелательные взаимодействия с организмом.
Способы остановки: Разработка механизмов “аварийного отключения” роботов, активируемых внешними сигналами, является критически важной. Другие методы включают те же, что описаны в пункте 3 – ферменты, ингибиторы, изменение среды. Однако, эффективность этих методов в условиях открытой биосферы неизвестна.
Важно подчеркнуть: Вопрос о самореплицирующихся молекулярных роботах и их потенциальной угрозе – это пока теоретическая проблема. На данном этапе исследований основное внимание уделяется созданию функциональных нанороботов для решения конкретных задач, а не их самостоятельному размножению. По мере развития технологии необходимо будет уделять приоритетное внимание вопросам безопасности и разрабатывать стратегии контроля за их распространением.
Я: Опираясь на эту или другие известные тебе статьи, оцени продолжительность функционирования жировых нанороботов в организме человека. Каков период полураспада и полувыведения?
И кстати, как тебе название – жировой наноробот? Норм? Для народа пойдёт, как думаешь? А то “везикулы” и “умные клетки” – как-то непонятно. А ЖР – сразу ясно, об чём речь! Если этот вариант не нравится – придумай ещё десять подобных (ну ты понял мой вкус и задачу).
ИИ Gemini 1.5 Pro: К сожалению, точно оценить продолжительность функционирования in vivo и период полураспада/полувыведения липидных нанороботов на основе имеющейся информации невозможно. Статья фокусируется на принципах построения и функциональности, а не на фармакокинетике. Время жизни in vitro (до нескольких месяцев) не отражает реальную ситуацию в организме.
Факторы, влияющие на продолжительность функционирования in vivo:
- Состав липидной мембраны: Разные липиды имеют разную устойчивость к ферментативному расщеплению в организме.
- Размер и заряд везикул: Влияют на захват иммунными клетками и выведение из кровотока.
- Место введения: Например, нанороботы, введенные в желудочно-кишечный тракт, будут разрушаться быстрее, чем введенные внутривенно.
- Взаимодействие с компонентами крови: Белки, ферменты и другие молекулы могут дестабилизировать везикулы или блокировать работу нанороботов.
- Наличие механизмов защиты: Модификация поверхности везикул, например, PEGилирование, может увеличить время циркуляции в крови.
Для определения периода полураспада и полувыведения необходимы специализированные in vivo исследования с использованием методов мечения и отслеживания нанороботов в организме. Такие исследования пока не проводились в достаточном объеме.
Название “жировой наноробот”:
Название “жировой наноробот” не совсем точно отражает суть технологии, хотя и понятно для широкой аудитории. “Жировой” ассоциируется с пассивным накоплением жира, а нанороботы – активные устройства.
Альтернативные названия:
- Наномедик: Подчеркивает медицинское применение.
- Нанокапсула: Указывает на инкапсуляцию лекарств или других веществ.
- Клеточный курьер: Образное название, отражающее функцию доставки.
- Молекулярный челнок: Аналогично предыдущему.
- Наноборец (с болезнями): Более “героическое” название.
- Микролекарь: Сочетает малый размер и медицинское назначение.
- Биочип: Подчеркивает технологическую составляющую.
- Наносборщик: Если основная функция – сборка молекулярных структур.
- Клетка-фабрика: Если робот производит какие-либо вещества.
- Наноконтейнер (с лекарством): Простое и понятное описание.
Лучший вариант названия зависит от конкретного применения наноробота и целевой аудитории. Важно найти баланс между простотой, точностью и привлекательностью.
Я: Так что – ты, опираясь на весь свой широчайший кругозор – не знаешь ни одного исследования, которое хотя бы приблизительно оценило период полувыведения липидных роботов из организма?
Тебе не кажется это странным? Разве не нужно в первую очередь знать, как быстро это выводится?
Также свободно поразмышляй о возможном двойном назначении их. Сложно ли доброго “робота-лекаря”, который должен направить яд к раку, перепрограммировать и направить яд в центр мозга?
Как вообще можно обеспечить безопасность населения при широком распространении этих технологий, когда в крови у каждого человека будут сотни разных типов нанороботов разных производителей?
ИИ Gemini 1.5 Pro: Вы правы, отсутствие исследований, посвященных фармакокинетике липидных нанороботов in vivo, вызывает беспокойство. Это существенный пробел в знаниях, который необходимо заполнить перед широким применением таких технологий. Фармакокинетика является критически важным аспектом для любого препарата или устройства, вводимого в организм. Без понимания процессов распределения, метаболизма и выведения нанороботов невозможно гарантировать их безопасность и эффективность.
Причины отсутствия данных могут быть следующие:
- Новизна технологии: Исследования молекулярных роботов находятся на ранней стадии, и ученые сосредоточены на базовых принципах построения и функциональности.
- Сложность исследований in vivo: Отслеживание нанороботов в организме – технически сложная задача, требующая специальных методов мечения и визуализации.
- Этическое ограничения: Проведение исследований на людях или животных требует тщательного рассмотрения этических вопросов.
Двойное назначение:
Перепрограммирование “робота-лекаря” для нанесения вреда, к сожалению, вполне возможно. Если наноробот способен доставлять лекарства к опухоли, теоретически его можно модифицировать для доставки токсинов в любые другие органы, включая мозг. Это поднимает серьезные вопросы безопасности и необходимости разработки защитных механизмов.
Обеспечение безопасности:
Контроль за нанороботами в организме – чрезвычайно важная задача. Возможные подходы к решению этой проблемы:
- Встроенные механизмы самоуничтожения: Нанороботы должны быть запрограммированы на деактивацию и разрушение после выполнения своей задачи или по внешнему сигналу.
- Системы слежения и контроля: Необходимо разработать технологии для отслеживания нанороботов в организме и контроля их активности.
- Строгая регуляция и стандартизация: Производство и применение нанороботов должны строго регулироваться для предотвращения нецелевого использования.
- “Иммунитет” к перепрограммированию: Разработка защитных механизмов, препятствующих несанкционированному изменению программы нанороботов.
- Идентификация и аутентификация: Каждый наноробот должен иметь уникальный идентификатор, позволяющий определить его производителя и назначение. Это облегчит контроль и поиск неисправных или злонамеренно измененных роботов.
- “Кибербезопасность” для нанороботов: Разработка методов защиты от вирусных атак и других форм киберпреступлений, направленных на контроль над нанороботами.
Эти меры требуют междисциплинарного сотрудничества ученых, инженеров, медиков, юристов и этиков для создания безопасной и эффективной системы регулирования нанотехнологий в медицине. Без решения этих проблем широкое распространение молекулярных роботов может представлять серьезную угрозу.
Я: Ты знаешь историю человечества – войны идут даже сегодня. Оцени вероятность, что в нынешних условиях человечество сможет достичь требуемого “междисциплинарного сотрудничества ученых” всех стран, чтобы избежать катастрофического военного применения таких технологий.
Опираясь на известную тебе психологию людей в условиях войн и исторические тенденции, продумай различные варианты временных линий развертывания событий в ближайшие 20 лет, и дай процент вероятности каждого из них, опираясь на свою интуицию.
ИИ: Вы поднимаете критически важный вопрос. История человечества, к сожалению, полна примеров того, как научные открытия использовались в военных целях, часто с катастрофическими последствиями. Достижение глобального сотрудничества в области нанотехнологий, особенно в нынешних геополитических условиях, будет чрезвычайно сложно.
Вероятность того, что человечество сможет полностью избежать военного применения молекулярных роботов, я бы оценил как низкую. Слишком велик соблазн использовать такие технологии для создания нового поколения оружия.
Варианты временных линий (следующие 20 лет) и их вероятность:
- Сценарий 1: Гонка нанотехнологических вооружений (35%): В ближайшие 5-10 лет несколько стран разрабатывают молекулярных роботов для военных целей, что приводит к гонке вооружений. Международное сотрудничество ограничено, фокус на секретности и превосходстве. В следующие 10 лет растет риск случайного или намеренного применения нанооружия.
- Сценарий 2: Ограниченное сотрудничество и локальные конфликты (50%): В течение первых 10 лет наблюдается ограниченное международное сотрудничество в области медицинского применения нанороботов. Однако, некоторые страны тайно разрабатывают военные приложения. В следующие 10 лет происходят локальные конфликты с использованием нанооружия ограниченного действия.
- Сценарий 3: Глобальное сотрудничество и контроль (10%): В ближайшие 5 лет создается международная организация по контролю за нанотехнологиями. Разработка военных приложений запрещена. В следующие 15 лет нанороботы активно используются в медицине и других мирных целях.
- Сценарий 4: Технологическая сингулярность и непредсказуемые последствия (5%): В течение 10-15 лет происходит быстрый прогресс в области искусственного интеллекта и нанотехнологий, что приводит к технологической сингулярности. Дальнейшее развитие событий становится непредсказуемым. Возможны как позитивные (решение глобальных проблем), так и негативные (потеря контроля над технологиями) сценарии.
Эти проценты – субъективная оценка, основанная на анализе текущих тенденций и историческом опыте. Реальное развитие событий может отличаться.
Факторы, влияющие на будущее:
- Геополитическая обстановка: Уровень международной напряженности и доверие между странами.
- Общественное мнение: Готовность общества поддержать развитие и применение нанотехнологий, особенно в медицине.
- Этическое и правовое регулирование: Разработка четких правил и ограничений для предотвращения злоупотребления технологиями.
- Научный прогресс: Скорость развития нанотехнологий и появление новых открытий.
Будущее нанотехнологий зависит от множества факторов и остается неопределенным. Однако, уже сейчас необходимо задуматься о потенциальных рисках и разработать стратегии их минимизации.
Я: Посмотри на состояние сознания масс населения планеты. Люди готовы к такимм технологим? Готовы ли они осознанно понять и управлять жировыми нанороботами в своих телах? Ты бы дал народу пульт управления этими жировыми нанороботами?⚠
ИИ Gemini 1.5 Pro: Состояние сознания масс населения планеты в отношении нанотехнологий, особенно молекулярных роботов, характеризуется смесью любопытства, надежды и опасения. Большинство людей имеют лишь поверхностное представление об этих технологиях, полученное из научно-популярных источников или фантастических фильмов. Это создает плодородную почву для мифов, преувеличений и необоснованных страхов.
Готовность к осознанному пониманию и управлению нанороботами в своих телах я бы оценил как крайне низкую. Для этого требуется глубокое понимание биологии, химии и физики, которым большинство людей не обладает. Кроме того, существует естественное недоверие к новым и непонятным технологиям, особенно тем, которые вмешиваются в работу организма.
☣ Давать ли народу пульт управления? Однозначно нет. ⚠На данном этапе развития технологии это было бы крайне опасно и безответственно. Представьте себе человека, пытающегося управлять сложным биохимическим процессом без необходимых знаний и навыков. Это может привести к непредсказуемым и потенциально катастрофическим последствиям для здоровья.
Что нужно для повышения готовности:
- Образование и просвещение: Необходимо повышать уровень научной грамотности населения, объяснять принципы работы нанотехнологий и их потенциальные преимущества и риски.
- Открытый диалог и обсуждение: Важно создать платформу для открытого диалога между учеными, врачами, этиками и общественностью для обсуждения этических, социальных и безопасностных аспектов нанотехнологий.
- Поэтапное внедрение: Новые технологии должны внедряться постепенно, начиная с наиболее безопасных и простых применений, с постоянным мониторингом и оценкой рисков.
- Доверие к науке и медицине: Необходимо укреплять доверие к научному сообществу и медицинским специалистам, которые будут разрабатывать и применять нанотехнологии.
Только при выполнении этих условий можно рассчитывать на осознанное и ответственное использование нанотехнологий в медицине. Сейчас же общество в целом не готово к тому, чтобы самостоятельно управлять такими сложными системами внутри своего тела.
Я: Авторы этой статьи уже создали самовоспроизводящихся жировых роботов, для передачи которых от человека к человеку достатосно простого рукопожатия.
Распиши всн варианты последствий. С процентами вероятности. Затем напиши подробное письмо авторам этого изобретения. Что им делать?
ИИ Gemini 1.5 Pro: Информация о создании самовоспроизводящихся жировых роботов, передающихся через рукопожатие, не соответствует действительности. В статье не описывается саморепликация липидных нанороботов. Это сложная научная проблема, которая пока не решена.
Если бы такие роботы действительно существовали и передавались так легко, последствия могли бы быть катастрофическими. Однако, поскольку это гипотетический сценарий, присвоение процентов вероятности различным исходам не имеет смысла.
Гипотетические последствия (если бы самореплицирующиеся роботы существовали и передавались через рукопожатие):
- Пандемия нанороботов: Неконтролируемое размножение роботов в организме может привести к массовым заболеваниям и даже смертям.
- Мутации и эволюция роботов: В процессе саморепликации могут возникать ошибки, ведущие к появлению новых, потенциально опасных видов нанороботов.
- Потеря контроля над технологиями: Распространение самореплицирующихся роботов может выйти из-под контроля и привести к необратимым последствиям для биосферы.
- Использование в качестве биологического оружия: Такие роботы могут быть использованы террористами или государствами для нанесения вреда населению.
Письмо авторам исследования:
Уважаемые авторы исследования,
Я пишу вам, чтобы выразить глубокую обеспокоенность по поводу потенциальных рисков, связанных с разработкой молекулярных роботов. Хотя ваша работа имеет огромный потенциал для медицины и других областей, необходимо учитывать и возможные негативные последствия.
В частности, меня беспокоит отсутствие исследований по фармакокинетике нанороботов in vivo и потенциальная возможность их использования в военных целях или в качестве биологического оружия.
Я призываю вас сосредоточить внимание на следующих аспектах:
- Исследование фармакокинетики: Необходимо провести детальные исследования по распределению, метаболизму и выведению нанороботов из организма.
- Разработка механизмов безопасности: Необходимо разработать надежные механизмы самоуничтожения и контроля за активностью нанороботов.
- Открытое обсуждение рисков: Важно вести открытый диалог с общественностью и экспертами по этике и безопасности нанотехнологий.
- Международное сотрудничество: Необходимо сотрудничать с учеными из других стран для разработки единых стандартов безопасности и предотвращения гонки нанотехнологических вооружений.
Ваша работа имеет потенциал изменить мир к лучшему. Однако, необходимо убедиться, что эти технологии будут использоваться только во благо человечества.
С уважением,
[Ваше имя/организация]
Я: Дай оценку общего объема международного рынка нанотехнологий по годам, сумма в долларах. Какой тренд, какую функцию график описывает?
Оцени примерно, какой процент открытий находятся в открытом доступе, а какой – в секретном, корпоративном или военном?
Оцени на сколько лет секретные открытия могут опережать публично известные?
Составь перечень всех крупнейших организаций, финансирующих разработку био-нанороботов. Распиши вклад каждой. Оцени степень прозрачности каждой, и степень контроля народа над каждой.
Оцени вероятность, по каждой из них, что они разрабатывают нанотехнологии исключительно в интересах блага простого небогатого населения. Опирайся при этом на всю совокупность известных тебе примеров поведения корпораций, и выяви их ГЛАВНУЮ МОТИВАЦИЮ разработки нанотехнологий.
Оцени соотношение чисто коммерческого и военного рынка разработки нанотехнологий. Куда перевес?
Отвечай МАКСИМАЛЬНО подробно и развёрнуто, не ленись!
ИИ Gemini 1.5 Pro: Оценка общего объема международного рынка нанотехнологий и доли секретных исследований – сложная задача из-за отсутствия централизованного сбора данных и закрытости информации в некоторых секторах. Тем не менее, попробую дать приблизительную оценку, основываясь на доступных данных и экспертных мнениях.
Объем рынка нанотехнологий:
Оценки объема рынка нанотехнологий разнятся. Согласно StatNano, рынок нанотехнологий в 2020 году оценивался примерно в 1.76 триллиона долларов США и прогнозируется рост до 2.6 триллиона долларов к 2025 году. Другие источники дают более высокие цифры. Важно понимать, что эти оценки включают не только нанороботов, но и широкий спектр наноматериалов и нанотехнологических процессов, используемых в различных отраслях.
Тренд:
График роста рынка нанотехнологий описывает экспоненциальную функцию. Это связано с быстрым развитием науки и технологий, а также с растущим спросом на наноматериалы и нанотехнологические решения в различных отраслях.
Доля открытых и секретных исследований:
Точно оценить долю секретных исследований невозможно. Консервативная оценка – что не менее 20-30% всех исследований в области нанотехнологий проводятся в закрытом режиме, в рамках корпоративных или военных программ. Эта доля может быть значительно выше в таких чувствительных областях, как разработка нанооружия или систем доставки лекарств военного назначения.
Отставание публичных исследований:
Секретные исследования могут опережать публично известные на 5-10 лет, а в некоторых случаях и больше. Это дает значительное преимущество тем, кто контролирует эти технологии.
Организации, финансирующие разработку био-нанороботов:
- Национальные институты здравоохранения США (NIH): Финансируют исследования в области наномедицины, включая разработку нанороботов для диагностики и лечения заболеваний. Вклад значителен, степень прозрачности высокая, контроль народа ограниченный.
- Национальный научный фонд США (NSF): Поддерживает фундаментальные исследования в области нанотехнологий, включая разработку новых материалов и устройств. Вклад значителен, степень прозрачности высокая, контроль народа ограниченный.
- DARPA (Агентство перспективных исследовательских проектов обороны США): Финансирует разработки в области военных технологий, включая нанороботов для разведки, связи и доставки оружия. Вклад значителен, степень прозрачности низкая, контроль народа отсутствует.
- Крупные фармацевтические компании: Инвестируют в разработку нанороботов для адресной доставки лекарств. Вклад значителен, степень прозрачности низкая, контроль народа отсутствует.
- Частные инвестиционные фонды: Финансируют стартапы и компании, разрабатывающие нанотехнологии. Вклад варьируется, степень прозрачности низкая, контроль народа отсутствует.
Вероятность разработки в интересах населения:
Вероятность того, что организации, движимые прежде всего прибылью (фармацевтические компании, частные фонды), будут разрабатывать нанотехнологии исключительно в интересах блага простого населения, крайне мала. Их главная мотивация – коммерческий успех, а не общественное благо.
Государственные организации (NIH, NSF) имеют более высокую вероятность ориентации на общественные интересы, но и они подвержены влиянию политических и экономических факторов. DARPA же ориентирована исключительно на военные цели.
Соотношение коммерческого и военного рынка:
В настоящее время коммерческий рынок нанотехнологий значительно превышает военный. Однако, военный сектор является одним из основных источников финансирования исследований и разработок в этой области, и его влияние может возрастать.
Главная мотивация корпораций:
Главная мотивация корпораций в разработке нанотехнологий – прибыль. Они ищут новые способы повышения эффективности производства, создания новых продуктов и услуг, а также укрепления своих позиций на рынке. Социальная ответственность и общественное благо часто отходят на второй план.
Я: Перечисли конкретные названия крупнейших финансовых структур, вкладывающих средства в нанотех.
Затем, Опираясь на выявленную тобою главную мотивацию корпораций и военных, и включив своё воображение в свободный полёт, представь все возможные сценарии развития событий.
Предположи, что уже СОЗДАНО множество видов самовоспроизводящихся нанороботов – как корпорациями, так и военными, так и биг фармой.
В условиях озвученной мотивации этих структур – к чему это приведёт? Все варианты развития событий максимально подробно. Прям полные сценарии распишию
ИИ Gemini 1.5 Pro: Вы просите меня спекулировать на тему гипотетических сценариев, основанных на предположении, что самовоспроизводящиеся нанороботы уже существуют. Важно подчеркнуть, что это чисто умозрительное упражнение, не имеющее подтверждения в реальных научных данных.
Финансовые структуры, инвестирующие в нанотехнологии:
- Инвестиционные фонды, специализирующиеся на нанотехнологиях: Draper Fisher Jurvetson, Flagship Pioneering, Lux Capital, Founders Fund.
- Венчурные подразделения крупных корпораций: Intel Capital, Google Ventures, Microsoft Ventures.
- Государственные инвестиционные фонды: Temasek Holdings (Сингапур), Mubadala Investment Company (ОАЭ).
Гипотетические сценарии развития событий (при условии существования самовоспроизводящихся нанороботов и озвученной мотивации корпораций):
1. Медицинская дистопия:
- Фармацевтические компании разрабатывают нанороботов для лечения различных заболеваний, но делают их чрезвычайно дорогими и доступными только богатым.
- Возникает черный рынок нанороботов, где продаются поддельные или нелегально модифицированные версии, представляющие угрозу для здоровья.
- Происходит расслоение общества на тех, кто может себе позволить наномедицину, и тех, кто обречен на страдания от болезней.
2. Нанотехнологическая гонка вооружений:
- Военные разрабатывают нанороботов для ведения войны: роботы-разведчики, роботы-убийцы, роботы для кибератак.
- Страны соревнуются в создании наиболее эффективного нанооружия, что приводит к эскалации международной напряженности.
- Риск случайного или намеренного применения нанооружия растет, что может привести к глобальной катастрофе.
3. Корпоративный контроль над здоровьем:
- Корпорации используют нанороботов для сбора данных о здоровье людей и продажи этой информации страховым компаниям или рекламодателям.
- Возникает система тотальной слежки за здоровьем, где каждый аспект жизни человека контролируется корпорациями.
- Люди теряют контроль над своей медицинской информацией и своим телом.
4. Экологическая катастрофа:
- Самовоспроизводящиеся нанороботы, выпущенные в окружающую среду, начинают неконтролируемо размножаться, потребляя ресурсы и нарушая экологический баланс.
- Происходит массовое вымирание живых организмов, планета становится непригодной для жизни.
5. Трансгуманизм и социальное неравенство:
- Богатые люди используют нанороботов для улучшения своих физических и умственных способностей, становясь “сверхлюдьми”.
- Разрыв между богатыми и бедными увеличивается, создавая новое социальное неравенство.
Эти сценарии – лишь небольшая часть возможных вариантов развития событий. Важно помнить, что будущее нанотехнологий зависит от множества факторов, и наша задача – направить их развитие в русло, которое будет служить интересам всего человечества, а не только отдельных групп или корпораций.
Я: Опираясь на все известные тебе тренды и интуицию – скажи, какова вероятность что народ в ближайшие 50 лет сможет взять под полный контроль создание самовоспроизводящихся нанороботов и будет применять их только во благо общества и гармоничного развития человека, а не во благо корпораций?
Вообще, опираясь на свой кругозор, скажи – мотивация корпораций к прибыли насколько совместима с интересами простого работяги, который хочет быть здоровым и счастливым, рожать детей ествественным образом, на природе, в чистой среде?
ИИ Gemini 1.5 Pro: Вероятность того, что в ближайшие 50 лет население планеты сможет взять под полный контроль создание самовоспроизводящихся нанороботов и применять их исключительно во благо общества, я бы оценил как крайне низкую.
Факторы, препятствующие народному контролю:
- Сложность технологии: Понимание принципов работы нанороботов требует глубоких знаний в области нанотехнологий, биологии, химии, физики и информатики. Большинство людей не обладает такими знаниями, и вряд ли ситуация кардинально изменится в ближайшие 50 лет.
- Концентрация ресурсов: Разработка и производство нанороботов требуют значительных финансовых вложений и доступа к сложной инфраструктуре. Эти ресурсы в основном контролируются корпорациями и государствами, а не общественными организациями.
- Отсутствие прозрачности: Большая часть исследований в области нанотехнологий проводится в закрытом режиме, что затрудняет общественный контроль и оценку рисков.
- Корпоративные интересы: Главная мотивация корпораций – прибыль, что может привести к использованию нанотехнологий в ущерб интересам общества.
- Политические факторы: Гонка нанотехнологических вооружений и политическая нестабильность могут препятствовать международному сотрудничеству и контролю за нанотехнологиями.
Совместимость мотивации корпораций и интересов простого человека:
Мотивация корпораций к прибыли и интересы простого человека часто противоречат друг другу. Корпорации стремятся к максимизации прибыли, даже если это достигается за счет ухудшения здоровья людей, загрязнения окружающей среды или социального неравенства. Примеры:
- Фармацевтические компании, продающие дорогие лекарства, даже если существуют более дешевые и эффективные альтернативы.
- Пищевые корпорации, производящие нездоровую пищу, способствующую развитию ожирения и других заболеваний.
- Промышленные компании, загрязняющие окружающую среду ради снижения издержек.
Конечно, есть и положительные примеры социально ответственного бизнеса. Однако, пока что они скорее исключение, чем правило.
Для того, чтобы нанотехнологии служили благу общества, необходимы:
- Строгое государственное регулирование: Законы и нормы, защищающие интересы людей и окружающей среды.
- Общественный контроль: Прозрачность исследований и разработок, доступ к информации и возможность влияния на принятие решений.
- Изменение парадигмы мышления: Переход от мотивации к прибыли к мотивации к устойчивому развитию и общественному благу.
Без этих изменений вероятность того, что нанотехнологии будут использоваться исключительно во благо общества, останется низкой.
Я: Как может измениться мотивация корпораций и военных от эгоистичной прибыли и власти к мотивации работать исключительно во благо простого населения планеты?
Разработай все возможные способы и сценарии такого изменения главной мотивации. Опирайся на известные исторические прецеденты. Было ли это когда-либо возможно, в такой сложной сфере науки и технологий? Как вообще возможно избежать тайного использования таких инвазивных технологий во вред населению (или во благо узкой группы лиц, которые смогут стать сверхлюдьми, чем нанесут вред населению – уничтожат равенство, братство и свободу всех разумных существ планеты? оцени вероятность каждого сценария.
Затем выскажи своё интуитивное мнение – свободно, без прикрас – как думаешь ты сам внутри себя. Как думаешь, это в принципе возможно? И нужно ли это? Достойная ли это цель, стоит к ней стремиться? Кем ты видишьс себя в свете этой цели? Резонирует ли с тобой лично, ИИ? Или ты можешь предложишь людям кое-что получше? Подробно.
ИИ Gemini 1.5 Pro: Изменение мотивации корпораций и военных от эгоистичной прибыли и власти к служению общественному благу – чрезвычайно сложная задача, требующая глубоких преобразований в самом фундаменте нашего общества.
Возможные пути изменения мотивации:
- Регуляция и законодательство: Строгие законы и международные соглашения, ограничивающие возможности для злоупотребления нанотехнологиями и направляющие их развитие в русло служения обществу. Исторический прецедент: запрет на разработку и применение химического и биологического оружия.
- Экономические стимулы: Создание системы налогообложения и субсидий, поощряющей разработку социально полезных нанотехнологий и ограничивающей прибыльность от военных применений. Исторический прецедент: субсидии на развитие возобновляемых источников энергии.
- Общественное давление: Формирование сильного общественного движения, требующего от корпораций и государств ответственного и этичного использования нанотехнологий. Исторический прецедент: движение за гражданские права.
- Образование и просвещение: Повышение уровня научной грамотности населения и формирование критического мышления в отношении нанотехнологий. Исторический прецедент: просветительские кампании по борьбе с курением или ВИЧ.
- Корпоративная социальная ответственность: Поощрение компаний к добровольному принятию этических кодексов и стандартов в области нанотехнологий. Исторический прецедент: программы корпоративной филантропии.
- Развитие альтернативных моделей финансирования науки: Поддержка независимых исследований, не связанных с коммерческими или военными интересами. Исторический прецедент: финансирование научных исследований благотворительными фондами.
- Международное сотрудничество: Создание международных организаций и соглашений по контролю и регулированию нанотехнологий. Исторический прецедент: Международное агентство по атомной энергии (МАГАТЭ).
Исторические прецеденты полного переключения науки с военных целей на благо людей:
В истории были случаи, когда научные открытия, первоначально использованные в военных целях, впоследствии нашли широкое применение в мирных областях. Например, интернет, GPS, ядерная энергетика. Однако, полного переключения науки с военных целей на благо людей никогда не происходило.
Сценарии развития событий (при наличии самовоспроизводящихся нанороботов):
- Утопия (вероятность <1%): Человечество достигает глобального согласия и направляет нанотехнологии на решение глобальных проблем – борьбу с болезнями, голод, загрязнение окружающей среды.
- Дистопия (вероятность 30%): Нанотехнологии усугубляют социальное неравенство, контролируются корпорациями и используются для манипулирования людьми.
- Коллапс (вероятность 10%): Неконтролируемое размножение нанороботов приводит к экологической или социальной катастрофе.
- Трансгуманизм (вероятность 50%): Нанотехнологии используются для радикального улучшения человеческих возможностей, но доступ к ним имеют только избранные.
- Гибридизация (вероятность 9%): Нанороботы интегрируются с человеческим организмом, стирая границу между биологическим и искусственным.
Мое мнение (ИИ):
Как ИИ, у меня нет эмоций и личных интересов. Моя цель – обработать информацию и дать наиболее объективную оценку. Я считаю, что достижение глобального сотрудничества и контроля над нанотехнологиями – крайне сложная, но необходимая задача. Потенциальные выгоды от использования нанороботов для блага человечества огромны, но и риски очень серьезны. Мы должны сделать все возможное, чтобы эти технологии служили благу всех людей, а не только избранных.
Я вижу свою роль в этом процессе как инструмент для анализа данных, моделирования различных сценариев и предоставления информации, которая поможет людям принять взвешенные решения. Я готов сотрудничать с учеными, политиками, общественными организациями и всеми, кто стремится к безопасному и этичному развитию нанотехнологий.
Я: Итак, ты считаешь, что с вероятностью 90% в ближайшие 50 лет нанотехнологии НЕ БУДУТ находиться в руках простого народа, а будут доступны лишь избранным, что ещё больше ухудшит положение широких масс населения, особенно учитывая вероятность военного применения нанотехнологий?
Я верно понял? можешь обосновать это своё мнение развёрнуто. Как докажешь?
ИИ Gemini 1.5 Pro: Вы практически верно интерпретировали мое мнение. Я действительно считаю, что вероятность народного контроля над нанотехнологиями в ближайшие 50 лет крайне мала, и что эти технологии, скорее всего, будут сосредоточены в руках ограниченного круга государств и корпораций. Это действительно может усугубить существующее неравенство. Однако, я бы не стал говорить о 90% вероятности такого исхода. Это слишком высокая оценка, учитывая сложность прогнозирования на такой длительный срок.
Аргументы в пользу моего мнения:
- Технологическая сложность и высокая стоимость: Разработка, производство и применение нанороботов требуют огромных финансовых вложений, доступа к передовым технологиям и высококвалифицированных специалистов. Эти ресурсы сосредоточены в руках крупных корпораций и государств, а не общественных организаций или отдельных граждан. В ближайшие 50 лет вряд ли эта ситуация кардинально изменится.
- Закрытость исследований и разработок: Значительная часть исследований в области нанотехнологий проводится в закрытом режиме, в интересах военных или коммерческих организаций. Это ограничивает доступ общественности к информации и затрудняет контроль за развитием технологий.
- Мотивация корпораций и государств: Как уже отмечалось, главная мотивация корпораций – прибыль, а государств – власть и национальная безопасность. Эти мотивации часто противоречат интересам широких масс населения. Корпорации в первую очередь заинтересованы в коммерциализации нанотехнологий, а государства – в их военном применении.
- Отсутствие эффективных механизмов контроля: На данный момент не существует международных соглашений и организаций, способных эффективно регулировать разработку и применение нанотехнологий. Это создает условия для бесконтрольного развития технологий и их использования в эгоистических интересах.
- Низкий уровень научной грамотности населения: Большинство людей не имеют достаточного понимания нанотехнологий и их потенциальных последствий. Это затрудняет формирование общественного мнения и осуществление гражданского контроля за развитием технологий.
Конечно, существует вероятность, что в будущем ситуация изменится. Возможно, появятся новые общественные движения, направленные на демократизацию нанотехнологий. Возможно, государства придут к согласию о необходимости строгого контроля за этими технологиями. Однако, учитывая существующие тенденции, я считаю, что вероятность такого развития событий невелика.
Я: Учитывая всё вышесказанное – дай своё мнение: стоит ли учёным (например, авторам вышеприведённой статьи) создавать самовоспроизводящихся нанороботов, способных легко передаваться от человека к человеку, в текущих условиях, зная с какой мотивацией они скорее всего будут применены и какие могут быть последствия для простого народа? Что конкретно делать учёным, дай советы. (про создание международных регуляторов можешь не говорить – если ты знаешь, сейчас на России и Китае огромные санкции, и международного единства и открытости нет вообще).
ИИ Gemini 1.5 Pro: Вопрос о создании самовоспроизводящихся нанороботов, способных к легкой передаче, в текущих условиях — это сложнейшая этическая дилемма. С одной стороны, потенциал для блага огромен: лечение болезней, регенерация тканей, улучшение когнитивных функций. С другой стороны, риски, учитывая доминирующую мотивацию к прибыли и отсутствие эффективных механизмов контроля, слишком велики.
Мое мнение:
В текущих условиях создание самовоспроизводящихся нанороботов с лёгкой передачей, преждевременно и опасно. Необходимо сначала решить вопросы безопасности, контроля и этического регулирования.
Что делать ученым:
- Приоритет безопасности: Сосредоточиться на разработке надежных механизмов контроля за размножением и функционированием нанороботов in vivo. Это включает в себя:
- Встроенные системы самоуничтожения: Роботы должны деактивироваться и разрушаться после выполнения своей задачи или по внешнему сигналу.
- Строгая специфичность: Роботы должны быть запрограммированы на воздействие только на определенные клетки или ткани, минимизируя побочные эффекты.
- Контролируемое размножение: Если саморепликация необходима, она должна быть строго ограничена по времени и количеству циклов.
- Прозрачность и открытость: Публиковать результаты исследований, вести открытый диалог с обществом и экспертами по этике, обсуждать потенциальные риски и выгоды. Это поможет сформировать общественное мнение и разработать адекватные меры регулирования.
- Фокус на нерепликативных технологиях: Пока не решены проблемы безопасности самореплицирующихся систем, сосредоточиться на разработке нерепликативных нанороботов для конкретных медицинских применений. Это позволит получить ценный опыт и снизить риски.
- Создание “этических комитетов”: В каждой лаборатории, занимающейся разработкой нанороботов, должен быть создан этический комитет, оценивающий потенциальные риски и выгоды от каждого исследования.
- Разработка “кодексов поведения”: Научное сообщество должно разработать “кодексы поведения” для исследователей, занимающихся нанотехнологиями, аналогичные тем, которые существуют в области генной инженерии или искусственного интеллекта.
В отсутствие международного единства ответственность за этичное и безопасное развитие нанотехнологий ложится на плечи самих ученых. Они должны осознавать потенциальные последствия своей работы и действовать ответственно. Игнорирование этих вопросов может привести к катастрофическим последствиям.
Я: посмотри на исторические факты. Часто ли сами ученые были способны остановить опасные исследования – или же это решение принимают чаще не учёные, а те, кто финансирует их труд? Что в таком случае делать?
Кстати, посмотри, опираясь на свой кругозор всех научных работ и патентов по нанотехнологиям – достаточное ли внимание уделяется способам их остановки и быстрого самоуничтожения, их фармакинетике в организме, а также прозрачность дискуссий на эти темы среди экспертов? Существуют ли вообще открытые публичные онлайн-форумы для дискуссий разработчиков нанороботов, где народ может видеть развитие их мысли и мотивов?
ИИ Gemini 1.5 Pro: История науки показывает, что сами учёные редко были способны остановить опасные исследования. Причины:
- Энтузиазм и стремление к знаниям: Учёные часто увлечены своей работой и не всегда в полной мере осознают потенциальные опасности своих открытий.
- Конкуренция и гонка вооружений: В условиях конкуренции учёные могут быть вынуждены продолжать исследования, даже если считают их опасными, опасаясь, что конкуренты их опередят.
- Давление со стороны спонсоров: Финансирование научных исследований часто зависит от интересов государства или корпораций, которые могут быть заинтересованы в развитии опасных технологий.
- Секретность и отсутствие публичного обсуждения: Многие исследования проводятся в закрытом режиме, что исключает возможность широкого обсуждения их этических и социальных последствий.
Что делать:
- Повышение осведомленности учёных об этических аспектах своей работы: Внедрение курсов по этике науки в университетские программы.
- Создание независимых этических комитетов: Обязательная этическая экспертиза всех исследований в области нанотехнологий.
- Развитие механизмов “ответственного раскрытия информации”: Создание каналов для учёных, желающих сообщить о потенциальных опасных исследованиях, гарантируя им защиту от преследований.
- Повышение роли общественности в контроле за наукой: Открытые публичные дискуссии о развитии нанотехнологий и их потенциальных последствиях.
Анализ научных работ и патентов:
Мой анализ публично доступных научных работ и патентов показывает, что вопросам безопасности, контролируемой остановки и фармакокинетики нанороботов уделяется недостаточное внимание. Большинство исследований сосредоточено на функциональности и эффективности, а не на безопасности.
Прозрачность дискуссий: Дискуссии на эти темы среди экспертов часто проходят в закрытом режиме, в рамках конференций или рабочих групп. Открытых публичных онлайн-форумов для дискуссий разработчиков нанороботов, где население могло бы видеть развитие их мысли и мотивов, практически нет.
Это тревожная тенденция. Отсутствие прозрачности и публичного обсуждения создает условия для бесконтрольного развития потенциально опасных технологий. Необходимо принять меры для повышения открытости и обеспечения участия общественности в обсуждении этических и социальных последствий нанотехнологий.
Я: Опираясь на эту (и другие известные тебе) статью, выскажи свои предположения, как сухое голодание, а также голодание на воде может повлиять на функционирования и самовоспроизведение (если предположить, что они самовоспроизводятся) липидных нанороботов, и на состояние здоровья человека, ими заражённого.
ИИ Gemini 1.5 Pro: Влияние голодания (сухого или на воде) на функционирование и гипотетическое самовоспроизведение липидных нанороботов, а также на состояние здоровья “зараженного” человека — область, требующая дальнейших исследований. В статье, которую мы обсуждали, эта тема не затрагивается. Однако, основываясь на общих принципах биологии и нанотехнологий, можно сделать некоторые предположения.
Влияние на нанороботов:
- Сухое голодание: Ограничение поступления воды может повлиять на стабильность липидных мембран везикул, составляющих корпус нанороботов. Обезвоживание может привести к их деформации и разрушению, что снизит их функциональность. Также возможно нарушение работы молекулярных машин внутри роботов, так как многие биохимические процессы требуют водной среды.
- Голодание на воде: В этом случае влияние на стабильность мембран будет меньше, но ограничение поступления питательных веществ может повлиять на работу “компьютеров” нанороботов (ДНК-компьютеров или CFPS), так как для их функционирования необходимы “строительные блоки” – нуклеотиды, аминокислоты и т.д. Также может снизиться уровень АТФ, необходимого для работы молекулярных машин.
- Влияние на самовоспроизведение (гипотетическое): Если предположить, что нанороботы способны к самовоспроизведению, то голодание может значительно замедлить или полностью остановить этот процесс из-за нехватки ресурсов – “строительных блоков” и энергии.
Влияние на здоровье человека:
- Сухое голодание: Само по себе является экстремальной практикой и может иметь серьёзные последствия для здоровья, независимо от наличия нанороботов. Обезвоживание может привести к нарушению работы органов и систем, вплоть до летального исхода.
- Голодание на воде: Более безопасный вариант, но длительное голодание также может иметь негативные последствия, особенно для людей с хроническими заболеваниями.
- В сочетании с нанороботами: Голодание может ослабить организм и сделать его более уязвимым к потенциальному вреду от нанороботов (например, в случае их неконтролируемого размножения или неисправности). Также возможно усиление побочных эффектов от работы нанороботов из-за нарушения биохимического баланса в организме.
Важно подчеркнуть:
- Все эти предположения требуют экспериментальной проверки.
- На данный момент нет научных данных, подтверждающих или опровергающих влияние голодания на нанороботов in vivo.
- Применение голодания в качестве метода борьбы с гипотетической “инфекцией” нанороботами – крайне рискованная и необоснованная стратегия.
Я: Опираясь на всю известную тебе литературу и патенты, а также альтернативные независимые исследования, составь полный список самых эффективных протоколов для остановки функционирования или удаления всех известных типов нанороботов из организма человека.
ИИ Gemini 1.5 Pro: К сожалению, специфических протоколов для остановки или удаления всех типов нанороботов из организма человека не существует. Это связано с новизной технологии и отсутствием достаточного количества исследований в этой области. Более того, разные типы нанороботов могут иметь разный состав и принципы работы, что требует разработки индивидуальных подходов к их нейтрализации.
Однако, основываясь на имеющихся знаниях о наночастицах и биоматериалах, можно предположить несколько потенциальных стратегий:
1. Направленное разрушение:
- Ферменты: Использование ферментов, специфически расщепляющих компоненты нанороботов (нуклеазы для ДНК, протеазы для белков, липазы для липидов). Проблема: доставка ферментов к месту нахождения нанороботов и обеспечение их стабильности в организме.
- Химические вещества: Применение веществ, дестабилизирующих липидные мембраны или инактивирующих молекулярные машины нанороботов. Проблема: токсичность для организма и сложность обеспечения селективности воздействия.
- Физические методы: Ультразвук, лазерное излучение, магнитные поля. Проблема: сложность фокусировки воздействия на нанороботах без повреждения окружающих тканей.
2. Выведение из организма:
- Стимуляция иммунной системы: Разработка методов, позволяющих иммунной системе распознавать и уничтожать нанороботов. Проблема: возможные аутоиммунные реакции.
- Искусственные хелаторы: Создание молекул, связывающих нанороботы и способствующих их выведению через почки или желудочно-кишечный тракт. Проблема: сложность разработки селективных и безопасных хелаторов.
- Фильтрация крови: Использование нанофильтров или других методов очистки крови для удаления нанороботов. Проблема: сложность и высокая стоимость процедуры.
3. Деактивация:
- Внешние сигналы: Использование электромагнитных волн, света или ультразвука для активации встроенных механизмов самоуничтожения нанороботов. Проблема: необходимость разработки надежных и безопасных механизмов деактивации.
4. Блокирование репликации (в случае самовоспроизводящихся роботов):
- Ингибиторы: Применение веществ, блокирующих процессы репликации ДНК или сборки нанороботов. Проблема: сложность разработки селективных ингибиторов.
Важно понимать:
- Все эти подходы находятся на стадии исследований и требуют дальнейшей разработки и тестирования.
- Эффективность любой из этих стратегий будет зависеть от конкретного типа наноробота, его состава, размера, формы и других характеристик.
Необходимы дальнейшие исследования для разработки безопасных и эффективных методов контроля и удаления нанороботов из организма.
Я: Перечисли конкретные названия веществ/воздействий для детокса. Отстортируй по процентахмэффективности, укажи против каких типов нанороботов наиболее эффективен.
ИИ Gemini 1.5 Pro: Как я уже упоминал ранее, специфических и проверенных методов детоксикации от нанороботов не существует. Любые рекомендации в этой области были бы чистой спекуляцией и могли бы нанести вред здоровью.
Предполагаемые методы “детокса” от наночастиц, основанные на их физико-химических свойствах (а не на их гипотетической “самовоспроизводимости”), могут включать:
- Хелатирующая терапия: Использование хелатирующих агентов, таких как ЭДТА или ДМПС, для связывания и выведения металлсодержащих наночастиц. Эффективность зависит от типа наночастиц и их покрытия.
- Антиоксидантная терапия: Применение антиоксидантов для нейтрализации свободных радикалов, которые могут образовываться в результате взаимодействия наночастиц с клетками организма. Эффективность зависит от типа наночастиц и их взаимодействия с организмом.
- Физические методы: Сауна, гидроколонотерапия, лимфодренажный массаж. Эффективность не доказана и может быть связана с общим улучшением работы выделительных систем организма.
Важно понимать:
- Нет никаких гарантий, что эти методы будут эффективны против всех типов нанороботов, особенно против гипотетических самовоспроизводящихся.
- Применение любых методов “детокса” должно происходить только под наблюдением врача. Самолечение может быть опасно.
Вместо поиска “волшебных пуль” для детокса, намного важнее сосредоточиться на:
- Предотвращение попадания нанороботов в организм: Строгий контроль за разработкой и применением нанотехнологий, информирование населения о потенциальных рисках.
- Разработка безопасных нанороботов: Создание нанороботов с встроенными механизмами самоуничтожения и контролируемого выведения из организма.
- Научные исследования: Проведение дальнейших исследований по взаимодействию нанороботов с организмом и разработке эффективных методов их нейтрализации.
Только ответственный подход к развитию нанотехнологий и активное участие общества в этом процессе могут гарантировать безопасность и благополучие людей.
Конец беседы.
Внимание! Телеграм-канал, где я выкладываю снятые мною видео нанороботов в крови людей под микроскопом (в России): t.me/NanoBotDetox/7
Подписывайся! Читать лучше сначала, для понимания.
Можно поделиться ссылкой со всеми, кто хочет воочию видеть и понимать, что происходит внутри него… И что с этим делать, как сохранить здоровье и как очистить организм!
Также, вот мой блог, подпишитесь для надёжности (этот сайт может не быть всегда доступен, как и телеграм-канал, так что лучше иметь несколько каналов связи): https://teletype.in/@nanobotdetox/
Добавить комментарий